我們之前報道過很多汽車駕駛模擬軟件,比如Carla、Prescan、carsim、Panosim。。。它們都有一個共同的特點,那就是需要手動建模。“這種情況”太慢了,通常需要幾周的時間才能建造幾個城市街區。最近,一家名為Parallel Domain的初創公司聲稱,其計算程序可以在不到一分鐘的時間內生成城市街區。

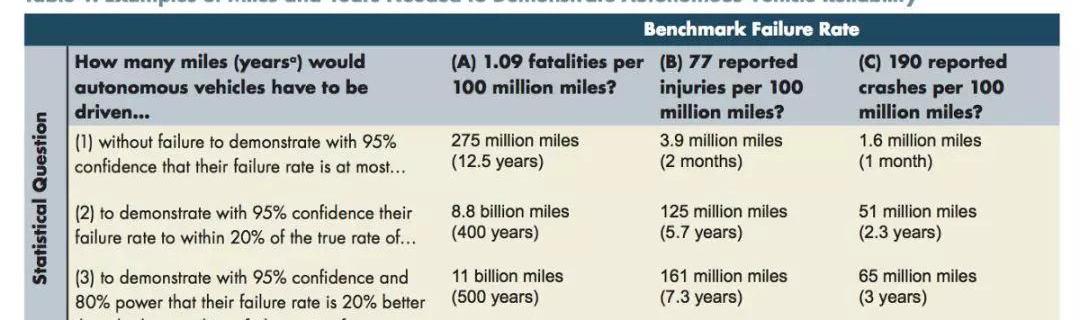
Parallel Domain是一家用于自動車輛模擬的3D環境生成軟件供應商。其創始人是凱文·麥克納馬拉,他曾是蘋果和皮克斯的員工。在蘋果工作期間,麥克納馬拉參與了一個自動駕駛項目,在那里他探索了虛擬環境的自動內容生成。他當時的想法是利用這項技術來訓練、測試、驗證和開發自動駕駛系統的人工智能。后來,他創立了Parallel Domain。麥克納馬拉說:“我們所做的是利用計算機圖形學來加速安全自動駕駛汽車的發展。”。“我們的想法是,在模擬中,你可以安全地犯錯誤,然后從中吸取教訓。在虛擬世界中,你不會在模擬中傷害任何人。”Parallel Domain平臺使用真實世界的地圖數據、程序增長算法和生成模型,可以教汽車如何駕駛,并確保汽車軟件正在學習。虛擬世界的所有元素都是可調節和可編程的,比如車道數量、地形類型、山脈位置、道路曲率等等。如果我們需要在模擬器中行駛數十億英里,我們如何構建這些英里?當前的機器學習算法必須經過大量數據集的訓練和測試。然而,真實世界的測試和數據收集需要真實的車輛、真實的駕駛員和實時的交通場景。根據蘭德公司的說法,如果你想證明自動駕駛汽車的安全性,你需要安全行駛110億英里。在現實世界中行駛這些英里是一個棘手的問題。所以很多人想到使用模擬駕駛數據,但用現有的人工方法建造幾個高保真的城市街區需要數周甚至數月的時間,而且通常需要大量重復的體力勞動。
Parallel Domain開創性的內容生成技術提供了一個可配置、詳細和可擴展的模擬環境。該軟件將自動生成自動駕駛汽車所需的虛擬里程和虛擬場景,以便自動駕駛汽車在到達現實世界之前進行學習。自動駕駛汽車公司正在使用該軟件來消除大規模模擬中最困難的障礙:構建車輛可能遇到的各種復雜環境。

為什么虛擬世界是自動生成的?這些由Parallel Domain獨特的方法自動生成的模擬世界有很多優點。有了這項技術,虛擬世界已經成為一個巨大的參數空間,工程師、幾行代碼甚至人工智能都可以隨意調整:為可能的世界做好準備,而不僅僅是今天的世界:增加一條自行車道,鋪開垃圾,讓路邊的樹提前生長,或者讓瀝青路面開裂或完全開裂,然后重新鋪上新瀝青。環境中單個因素的影響分析:在完全可重復性和參數化的世界中,通過改變其中一個元素,如車道數量、自行車道寬度或道路油漆狀況,來分析單個因素對整體的影響,從而產生同一精確場景的多次運行。對抗網絡:可以利用參數空間生成給定的虛擬世界,利用生成對抗技術為自動駕駛汽車創造一個困難的環境,并利用汽車的具體弱點進行訓練。隨機場:世界是由一組參數生成的,利用隨機場直接生成不同條件下的大量數據,幫助ML算法從虛擬世界轉移到現實世界。單元測試:到目前為止,還不可能大規模地產生一個完整的單元測試連續體。例如,有一個三向交叉點,可以以任何角度輸入,并且可以以1度、10度或0.1度的增量嘗試所有交叉點。很快就會有數以百萬計的組合形成一個連續的測試空間。模擬數據的優點有很多方面。模擬(合成數據)是真實駕駛(真實數據)的理想基礎,它們構成了一個很好的組合。有時我們會問,“合成數據什么時候才能像re一樣好……
-世界數據?“事實上,合成數據和真實數據是相輔相成的,并將它們結合在一起,打造出一輛更安全、更可靠的汽車。模擬數據在某些領域有很大的優勢:真實駕駛有風險/模擬駕駛完全安全。真實駕駛很慢(一輛車一天只能行駛很多英里)/模擬駕駛可以很快,可能快幾千倍。真實駕駛每英里的成本很高(汽車維修、汽油、駕駛員)/模擬駕駛只是成本的一小部分(一旦建立了模擬器和虛擬世界)。真實駕駛需要管理真實車輛/模擬需要計算機。真實駕駛通常很無聊,沒有信息/模擬可以使汽車在具有挑戰性的環境下學習更多的真實世界數據,這需要對結果數據集進行容易出錯的注釋。這是在訓練ML算法/模擬,以便每次都提供完整的注釋數據。

Parallel Domain已經籌集了250萬美元的種子資金,將為自動駕駛汽車的虛擬測試提供技術支持。模擬團隊可以使用Parallel Domain的軟件快速構建一個新的虛擬世界,并處理其中的任何變量,從車道數量到瀝青狀況。NIO成為第一個客戶。該仿真平臺的潛在需求不僅限于自動駕駛汽車。任何使用計算機視覺和機器學習來提高決策自主性的機器都需要一個高保真的虛擬世界來測試和證明其安全性。Parallel Domain是一種可以自動生成環境的技術,可以快速生成城市街區模型,從而消除公司大規模模擬的障礙。我們之前報道過很多汽車駕駛模擬軟件,比如Carla、Prescan、carsim、Panosim。。。它們都有一個共同的特點,那就是需要手動建模。“這種情況”太慢了,通常需要幾周的時間才能建造幾個城市街區。最近,一家名為Parallel Domain的初創公司聲稱,其計算程序可以在不到一分鐘的時間內生成城市街區。
Parallel Domain是一家用于自動車輛模擬的3D環境生成軟件供應商。其創始人是凱文·麥克納馬拉,他曾是蘋果和皮克斯的員工。在蘋果工作期間,麥克納馬拉參與了一個自動駕駛項目,在那里他探索了虛擬環境的自動內容生成。他當時的想法是利用這項技術來訓練、測試、驗證和開發自動駕駛系統的人工智能。后來,他創立了Parallel Domain。麥克納馬拉說:“我們所做的是利用計算機圖形學來加速安全自動駕駛汽車的發展。”。“我們的想法是,在模擬中,你可以安全地犯錯誤,然后從中吸取教訓。在虛擬世界中,你不會在模擬中傷害任何人。”Parallel Domain平臺使用真實世界的地圖數據、程序增長算法和生成模型,可以教汽車如何駕駛,并確保汽車軟件正在學習。虛擬世界的所有元素都是可調節和可編程的,比如車道數量、地形類型、山脈位置、道路曲率等等。如果我們需要在模擬器中行駛數十億英里,我們如何構建這些英里?當前的機器學習算法必須經過大量數據集的訓練和測試。然而,真實世界的測試和數據收集需要真實的車輛、真實的駕駛員和實時的交通場景。根據蘭德公司的說法,如果你想證明自動駕駛汽車的安全性,你需要安全行駛110億英里。在現實世界中行駛這些英里是一個棘手的問題。所以很多人想到使用模擬駕駛數據,但用現有的人工方法建造幾個高保真的城市街區需要數周甚至數月的時間,而且通常需要大量重復的體力勞動。
Parallel Domain開創性的內容生成技術提供了一個可配置、詳細和可擴展的模擬環境。該軟件將自動生成自動駕駛汽車所需的虛擬里程和虛擬場景,以便自動駕駛汽車在到達現實世界之前進行學習。自動駕駛汽車公司正在使用該軟件來消除大規模模擬中最困難的障礙:構建車輛可能遇到的各種復雜環境。
為什么虛擬世界是自動生成的?這些由Parallel Domain獨特的方法自動生成的模擬世界有很多優點。有了這項技術,虛擬世界變得……
巨大的參數空間,可以由工程師、幾行代碼甚至人工智能隨意調整:為可能的世界做好準備,而不僅僅是今天的世界:增加一條自行車道,鋪開垃圾,讓路邊的樹提前生長,或者讓瀝青路面開裂或完全開裂,然后重新鋪設新的瀝青。環境中單個因素的影響分析:在完全可重復性和參數化的世界中,通過改變其中一個元素,如車道數量、自行車道寬度或道路油漆狀況,來分析單個因素對整體的影響,從而產生同一精確場景的多次運行。對抗網絡:可以利用參數空間生成給定的虛擬世界,利用生成對抗技術為自動駕駛汽車創造一個困難的環境,并利用汽車的具體弱點進行訓練。隨機場:世界是由一組參數生成的,利用隨機場直接生成不同條件下的大量數據,幫助ML算法從虛擬世界轉移到現實世界。單元測試:到目前為止,還不可能大規模地產生一個完整的單元測試連續體。例如,有一個三向交叉點,可以以任何角度輸入,并且可以以1度、10度或0.1度的增量嘗試所有交叉點。很快就會有數以百萬計的組合形成一個連續的測試空間。模擬數據的優點有很多方面。模擬(合成數據)是真實駕駛(真實數據)的理想基礎,它們構成了一個很好的組合。有時我們會問,“合成數據什么時候才能和真實世界的數據一樣好?”事實上,合成數據和真實數據是相輔相成的,并將它們結合在一起,打造出一輛更安全、更可靠的汽車。模擬數據在某些領域具有很大優勢:真實駕駛有風險/模擬駕駛完全安全。真正的駕駛很慢(一輛車一天只能行駛很多英里)/模擬駕駛可以很快,可能快幾千倍。真實駕駛每英里的成本很高(汽車維護、汽油、駕駛員)/模擬駕駛只是成本的一小部分(一旦建立了模擬器和虛擬世界)。真實駕駛需要管理真實車輛/模擬需要計算機。真實駕駛通常很無聊,沒有信息/模擬可以使汽車在具有挑戰性的環境下學習更多的真實世界數據,這需要對結果數據集進行容易出錯的注釋。這是在訓練ML算法/模擬,以便每次都提供完整的注釋數據。
Parallel Domain已經籌集了250萬美元的種子資金,將為自動駕駛汽車的虛擬測試提供技術支持。模擬團隊可以使用Parallel Domain的軟件快速構建一個新的虛擬世界,并處理其中的任何變量,從車道數量到瀝青狀況。NIO成為第一個客戶。該仿真平臺的潛在需求不僅限于自動駕駛汽車。任何使用計算機視覺和機器學習來提高決策自主性的機器都需要一個高保真的虛擬世界來測試和證明其安全性。Parallel Domain是一種可以自動生成環境的技術,可以快速生成城市街區模型,從而消除公司大規模模擬的障礙。
標簽:
2018年4月21日,由精進電動科技股份有限公司創建十周年慶典暨“新能源汽車技術高端論壇”在京隆重舉辦。
1900/1/1 0:00:005月3日下午,由GNEV官方機構主辦、第一電動網承辦的“中國汽車新硅谷2018長三角未來汽車供應鏈創新論壇”在上海奧迪國際賽車場空中餐廳舉行,
1900/1/1 0:00:00近日從歐拉汽車官方獲悉,歐拉R1車型將于今年年底正式上市。新車定位于純電動微型車,采用了可愛造型風格,續航里程將達到300公里。
1900/1/1 0:00:00近日京威股份002662SZ發布公告稱,終止其此前擬發行股份購買江蘇卡威汽車工業集團股份有限公司下稱江蘇卡威剩余65股權的議案。
1900/1/1 0:00:005月2日,賓利在克魯工廠開工建造英國歷史上最大規模的太陽能發電停車場,該停車場建成后,賓利汽車所擁有的太陽能電池板將超過三萬塊,發電量可滿足相當于1750多戶家庭的電力需求。
1900/1/1 0:00:00從廣東省汕頭市交通部門了解到,近年來,汕頭市不斷加大公共交通財政投入,市民乘車環境不斷改善。
1900/1/1 0:00:00