今年7月5日,百度正式發布Apollo項目。在接下來的一段時間里,這個自動駕駛生態項目在國內外引起了極大的討論和解讀,成為許多汽車和自動駕駛從業者必須談論的話題。“你覺得阿波羅計劃怎么樣?它可靠嗎?如果有一個搜索引擎可以覆蓋我們的日常對話和文本交流,這個問題的搜索結果一定是巨大的。根據百度給出的數據,在過去的兩個月里,阿波羅計劃增加6.5萬行開源代碼,他們今天也帶來了這個計劃的最新變化:阿波羅1.5正式發布釋放。為什么選擇阿波羅1.5號?持續關注這個項目的同學應該記得,在7月5日的發布會上,百度展示了Apollo的技術全景,但當時他們實際上打開了Apollo1.0版本,可以實現封閉場館的跟蹤和自動駕駛能力。根據他們當時給出的時間表,2017年9月,開放固定車道的自動駕駛能力,到2017年12月,開放簡單城市路況的自動駕駛功能,這就是Apollo 2.0。

他們這次開發的阿波羅1.5實際上打開了固定車道自動駕駛的能力。換句話說,除了人們經常提到的1.0和2.0版本外,今天發布的1.5版本實際上在百度的計劃中,它不是一個“臨時想法”。在技術層面具體開放了什么?此時,有必要跳出經典的阿波羅技術架構圖。讓我們回顧一下1.0和2.0版本的路線圖:1.0,藍色方框是打開的能力:

2.0,與1.0相比,增加了紫色盒子的內容:

阿波羅1.5號的路線圖是這樣的,黃色部分是這次開放的:

可以看出,在開源軟件平臺層面,此次開放了Map Engine、Perception、Planning和端到端深度學習四大功能。在云服務平臺層面,此次開放了高清地圖和模擬平臺兩部分。在硬件方面,Apollo已經開放了對激光雷達的支持。將這些功能添加到1.0版本中開發的功能中,Apollo 1.5可以實現的功能是“固定車道晝夜自動駕駛”,也就是說,如果你想做基于Apollo開源代碼的自動駕駛,你可以在1.5版本中使用這套東西,讓你的車在單車道上實現自動駕駛和跟車功能。請允許我跳下話題:百度,阿波羅1.5號會議,技術性很強。如果不是對自動駕駛技術有深入研究的記者,可能會感到非常眩暈。當然,出席新聞發布會的不僅是媒體,合作伙伴和潛在合作伙伴也可能“喜歡”聽到這句話。但這里仍然有必要對技術方面的內容進行分解。讓我們看看1.5版本的五大功能:障礙感知、決策規劃、云模擬、高精度地圖服務和端到端深度學習。在Apollo平臺研發負責人王京奧看來,前四項能力“如期開放”,在Apollo1.5開啟端到端深度學習能力有點“出乎意料”。在我看來,開放能力的選擇是由每個階段的目標決定的。從1.0的封閉場自動跟蹤到1.5的固定車道自動駕駛,必須開放障礙感知、決策規劃、模擬測試和高精度地圖的能力,否則很難實現1.5的目標。讓我們先談談障礙感知。根據百度的說法,這種能力是建立在深度學習的基礎上的。具體原理是通過Velodyne的64線激光雷達采集周圍環境的點云數據,然后使用NVIDIA的GPU通過CUDA、CuDNN和Caffe技術準確識別障礙物。一方面,它可以預測障礙物的行為。另一方面,Apollo將提供不同的算法來適應不同的障礙。

這也解釋了為什么百度應該在Apollo中開放對激光雷達的支持……
5.作為百度投資的公司,Velodyne今天也在現場發布消息:他們在中國正式上市了32線激光雷達產品VLP-32C(請記住,它是32C)。此外,對于Apollo生態會員,Velodyne還將提供“特殊服務”:如果這些公司需要在自己的自動駕駛測試車上安裝激光雷達,Velodyn將提供更短的交付周期、特殊的技術支持,當然還有“生態會員專享價”。

決策規劃:系統可以對無人車收集的數據進行過濾和聚合,并在決策規劃模塊中重構這些數據。基于此,使用不同的優化器來繪制無人車最安全、最平滑的行駛路徑。仔細看圖片,理解的學生自然會理解:

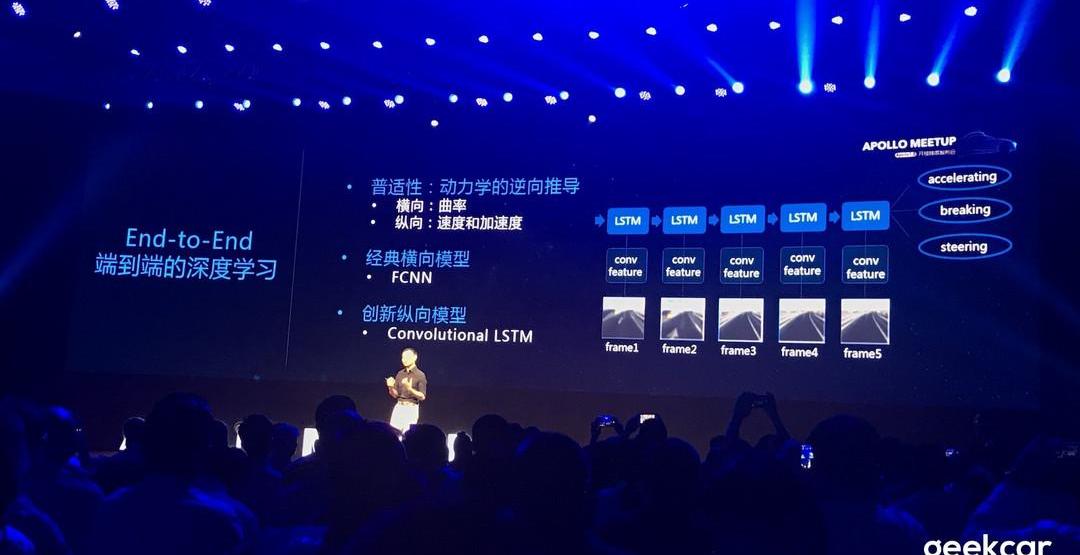
端到端深度學習:采用卷積神經網絡和基于深度學習的創新神經網絡。
高精度地圖:這是實現自動駕駛的基礎之一。此前,我們也用一篇文章介紹了百度高精地圖的具體采集和制作過程。百度認為,他們的高精度地圖有三個核心優勢:高精度、高生產效率和廣覆蓋。百度的目標是,到2020年,Apollo高精度地圖將覆蓋全國所有高等級道路和城市重點道路。目前,全國高速公路和特定城市道路的高精度地圖已經開放,精度達到15-20厘米。云模擬:百度稱其為自動駕駛的“加速器”。其意義在于,“虛擬路測”可以在模擬平臺上進行,而無需在自動駕駛儀上進行實際路測,從而達到快速訓練算法和積累數據的目的,節約成本,提高效率,快速迭代。
阿波羅模擬平臺的優勢在于內置高精度地圖、海量場景、云計算能力和專業的測量系統(測量系統也稱為“裁判”,用于評估測試的算法水平)。根據百度給出的信息,阿波羅模擬平臺的虛擬計算能力可以達到“每天一百萬公里”。好吧,這就是這些新的開放能力的引入。說實話,百度在發布會上提供的信息比我寫的多得多,他們對每一項能力都做了非常詳細的解釋。如果你是自動駕駛技術的開發者,你可以訪問Apollo的官方網站了解更多信息。如果你是一個吃瓜群眾,對這一部分有一個基本的了解就足夠了。當然,還有另一種可能性:作為一個吃瓜群眾,也許你看完這些東西后,想去DIY一輛自動駕駛汽車?在談到技術之后,讓我們談談阿波羅更宏觀的東西。“開發者”一詞被百度反復提及。作為一個開放的自動駕駛程序,開發人員的重要性不言而喻。如果你不太理解,你可以參考Android的例子。用百度的話來說,開發者的成功就是阿波羅項目的成功。在發布會上,三位“開發者”分別從不同角度講述了他們的經歷,分別是金龍客車、Momenta和智行哲科技。金龍修改了一輛6米長的公交車的硬件,并注入了阿波羅1.0的代碼,使車輛能夠在一周內在封閉的地方進行跟蹤。這也標志著阿波羅應用從乘用車擴展到商用車。Momenta和智智提供了Apollo 1.5的兩個應用案例。Momenta首席執行官曹旭東表示,他們基于Apollo1.5的自動駕駛測試車可以準確識別前方車輛突然并線、行人和自行車在白天和晚上過馬路等交通場景。當道路上出現垃圾桶、大型犬和紙箱等非典型交通場景時,車輛也可以做出準確的判斷,并提供安全穩定的駕駛決策。Momenta和Apollo的合作主要是驗證障礙物識別和激光雷達傳感的能力。至于明智的步行者,他們與阿波羅的合作主要基于高精度地圖和云模擬。目前,一輛“無人掃路車”已經投入北京的一個公園,智能旅行者為它提供了……
h一種無人化解決方案,利用Apollo的高精度地圖和定位服務,實現自動避障、自主跟蹤、定點啟停、自主清掃等功能。此外,智能出行者還利用云模擬平臺進行了自動駕駛模擬測試。據百度介紹,經過兩個多月的發展,Apollo Eco的合作伙伴數量已增至約70家。至于整個Apollo開發者生態的構成,可以通過百度副總裁吳學斌在現場展示的一張圖片來說明:

事實上,從1.0到未來的1.5到2.0,可以看出百度非常重視Apollo的迭代能力,并做出了一個可能不合適的比喻,這有點像特斯拉的OTA遠程更新。作為Apollo Ecology的合作伙伴,不斷獲得自動駕駛能力的更新可能是一個“活力”的問題。當被問及Apollo是如何盈利的時,吳學斌的回答簡短但有意義:他沒有在現有的價值鏈中淘金,而是從云端提供服務。今年7月5日,百度正式發布Apollo項目。在接下來的一段時間里,這個自動駕駛生態項目在國內外引起了極大的討論和解讀,成為許多汽車和自動駕駛從業者必須談論的話題。“你覺得阿波羅計劃怎么樣?它可靠嗎?如果有一個搜索引擎可以覆蓋我們的日常對話和文本交流,這個問題的搜索結果一定是巨大的。根據百度給出的數據,在過去的兩個月里,阿波羅計劃增加6.5萬行開源代碼,他們今天也帶來了這個計劃的最新變化:阿波羅1.5正式發布釋放。為什么選擇阿波羅1.5號?持續關注這個項目的同學應該記得,在7月5日的發布會上,百度展示了Apollo的技術全景,但當時他們實際上打開了Apollo1.0版本,可以實現封閉場館的跟蹤和自動駕駛能力。根據他們當時給出的時間表,2017年9月,開放固定車道的自動駕駛能力,到2017年12月,開放簡單城市路況的自動駕駛功能,這就是Apollo 2.0。
他們這次開發的阿波羅1.5實際上打開了固定車道自動駕駛的能力。換句話說,除了人們經常提到的1.0和2.0版本外,今天發布的1.5版本實際上在百度的計劃中,它不是一個“臨時想法”。在技術層面具體開放了什么?此時,有必要跳出經典的阿波羅技術架構圖。讓我們回顧一下1.0和2.0版本的路線圖:1.0,藍色方框是打開的能力:
2.0,與1.0相比,增加了紫色盒子的內容:
阿波羅1.5號的路線圖是這樣的,黃色部分是這次開放的:
可以看出,在開源軟件平臺層面,此次開放了Map Engine、Perception、Planning和端到端深度學習四大功能。在云服務平臺層面,此次開放了高清地圖和模擬平臺兩部分。在硬件方面,Apollo已經開放了對激光雷達的支持。將這些功能添加到1.0版本中開發的功能中,Apollo 1.5可以實現的功能是“固定車道晝夜自動駕駛”,也就是說,如果你想做基于Apollo開源代碼的自動駕駛,你可以在1.5版本中使用這套東西,讓你的車在單車道上實現自動駕駛和跟車功能。請允許我跳下話題:百度,阿波羅1.5號會議,技術性很強。如果不是對自動駕駛技術有深入研究的記者,可能會感到非常眩暈。當然,出席新聞發布會的不僅是媒體,合作伙伴和潛在合作伙伴也可能“喜歡”聽到這句話。但這里仍然有必要對技術方面的內容進行分解。讓我們看看1.5版本的五大功能:障礙感知、決策規劃、云模擬、高精度地圖服務……
ce和端到端深度學習。在Apollo平臺研發負責人王京奧看來,前四項能力“如期開放”,在Apollo1.5開啟端到端深度學習能力有點“出乎意料”。在我看來,開放能力的選擇是由每個階段的目標決定的。從1.0的封閉場自動跟蹤到1.5的固定車道自動駕駛,必須開放障礙感知、決策規劃、模擬測試和高精度地圖的能力,否則很難實現1.5的目標。讓我們先談談障礙感知。根據百度的說法,這種能力是建立在深度學習的基礎上的。具體原理是通過Velodyne的64線激光雷達采集周圍環境的點云數據,然后使用NVIDIA的GPU通過CUDA、CuDNN和Caffe技術準確識別障礙物。一方面,它可以預測障礙物的行為。另一方面,Apollo將提供不同的算法來適應不同的障礙。
這也解釋了為什么百度應該在Apollo 1.5中開放對激光雷達的支持。作為百度投資的公司,Velodyne今天也在現場發布消息:他們在中國正式上市了32線激光雷達產品VLP-32C(請記住,它是32C)。此外,對于Apollo生態會員,Velodyne還將提供“特殊服務”:如果這些公司需要在自己的自動駕駛測試車上安裝激光雷達,Velodyn將提供更短的交付周期、特殊的技術支持,當然還有“生態會員專享價”。
決策規劃:系統可以對無人車收集的數據進行過濾和聚合,并在決策規劃模塊中重構這些數據。基于此,使用不同的優化器來繪制無人車最安全、最平滑的行駛路徑。仔細看圖片,理解的學生自然會理解:
端到端深度學習:采用卷積神經網絡和基于深度學習的創新神經網絡。
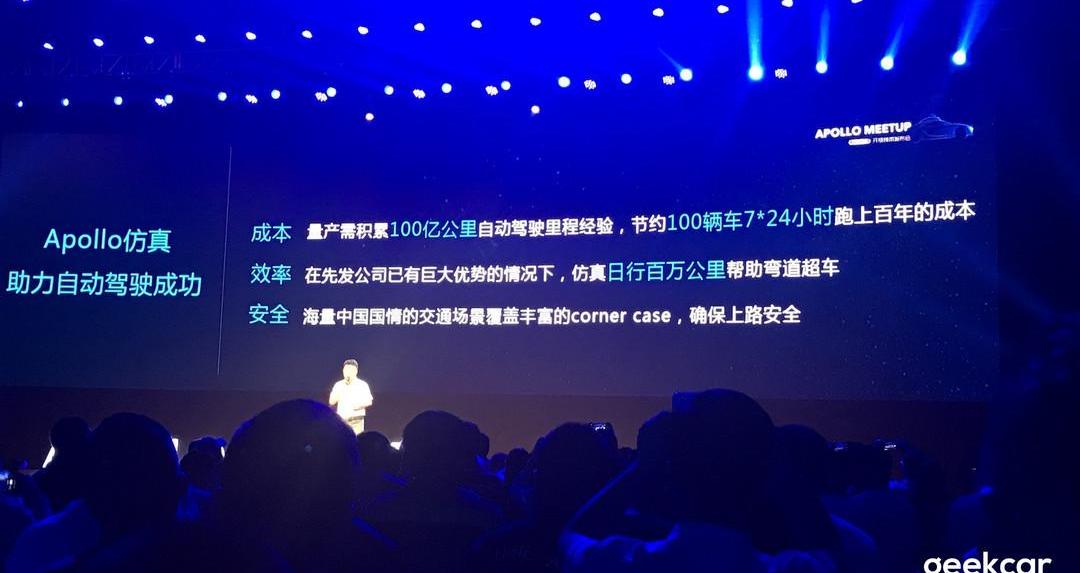
高精度地圖:這是實現自動駕駛的基礎之一。此前,我們也用一篇文章介紹了百度高精地圖的具體采集和制作過程。百度認為,他們的高精度地圖有三個核心優勢:高精度、高生產效率和廣覆蓋。百度的目標是,到2020年,Apollo高精度地圖將覆蓋全國所有高等級道路和城市重點道路。目前,全國高速公路和特定城市道路的高精度地圖已經開放,精度達到15-20厘米。云模擬:百度稱其為自動駕駛的“加速器”。其意義在于,“虛擬路測”可以在模擬平臺上進行,而無需在自動駕駛儀上進行實際路測,從而達到快速訓練算法和積累數據的目的,節約成本,提高效率,快速迭代。
阿波羅模擬平臺的優勢在于內置高精度地圖、海量場景、云計算能力和專業的測量系統(測量系統也稱為“裁判”,用于評估測試的算法水平)。根據百度給出的信息,阿波羅模擬平臺的虛擬計算能力可以達到“每天一百萬公里”。好吧,這就是這些新的開放能力的引入。說實話,百度在發布會上提供的信息比我寫的多得多,他們對每一項能力都做了非常詳細的解釋。如果你是自動駕駛技術的開發者,你可以訪問Apollo的官方網站了解更多信息。如果你是一個吃瓜群眾,對這一部分有一個基本的了解就足夠了。當然,還有另一種可能性:作為一個吃瓜群眾,也許你看完這些東西后,想去DIY一輛自動駕駛汽車?在談到技術之后,讓我們談談阿波羅更宏觀的東西。“開發者”一詞被百度反復提及。作為一個開放的自動駕駛程序,開發人員的重要性不言而喻。如果你不太理解,你可以參考Android的例子。用百度的話來說,開發者的成功就是阿波羅的成功……
項目。在發布會上,三位“開發者”分別從不同角度講述了他們的經歷,分別是金龍客車、Momenta和智行哲科技。金龍修改了一輛6米長的公交車的硬件,并注入了阿波羅1.0的代碼,使車輛能夠在一周內在封閉的地方進行跟蹤。這也標志著阿波羅應用從乘用車擴展到商用車。Momenta和智智提供了Apollo 1.5的兩個應用案例。Momenta首席執行官曹旭東表示,他們基于Apollo1.5的自動駕駛測試車可以準確識別前方車輛突然并線、行人和自行車在白天和晚上過馬路等交通場景。當道路上出現垃圾桶、大型犬和紙箱等非典型交通場景時,車輛也可以做出準確的判斷,并提供安全穩定的駕駛決策。Momenta和Apollo的合作主要是驗證障礙物識別和激光雷達傳感的能力。至于明智的步行者,他們與阿波羅的合作主要基于高精度地圖和云模擬。目前,一輛“無人掃路車”已在北京的一個公園投入使用,智能出行者為其提供了無人解決方案,其中利用Apollo的高精度地圖和定位服務,實現自動避障、自主跟蹤、定點啟停、自主掃路等功能。此外,智能出行者還利用云模擬平臺進行了自動駕駛模擬測試。據百度介紹,經過兩個多月的發展,Apollo Eco的合作伙伴數量已增至約70家。至于整個Apollo開發者生態的構成,可以通過百度副總裁吳學斌在現場展示的一張圖片來說明:
事實上,從1.0到未來的1.5到2.0,可以看出百度非常重視Apollo的迭代能力,并做出了一個可能不合適的比喻,這有點像特斯拉的OTA遠程更新。作為Apollo Ecology的合作伙伴,不斷獲得自動駕駛能力的更新可能是一個“活力”的問題。當被問及Apollo是如何盈利的時,吳學斌的回答簡短但有意義:他沒有在現有的價值鏈中淘金,而是從云端提供服務。
9月21日早間消息,谷歌自動駕駛汽車部門Waymo起訴Uber竊取商業機密,據路透報道,該公司向Uber索賠26億美元。周三時,舊金山聯邦法院舉行聽證會,Waymo在聽證會上給出索賠金額。
1900/1/1 0:00:00近日新能源汽車股票集體走高、董小姐的造車夢也不斷曝出新動向、中汽協宣布8月份新能源汽車銷量同比增長763無論是市場表現還是國家的政策支持,都表明新能源汽車將成為未來的主流車型。
1900/1/1 0:00:009月19日,貴州省印發的《貴州省支持電動汽車充電基礎設施加快建設若干政策措施》明確,貴州省將加快推進充電設施上高速公路,到2018年底,
1900/1/1 0:00:00近日,海南省發布《新能源汽車推廣應用推薦車型目錄2017年第三批》的通知,共有135款新能源車入選,其中乘用車12款,客車91款,貨車和專用車32款。
1900/1/1 0:00:00“貴就一個字,奧迪不止說一次。”一汽大眾奧迪又整出了新玩法,推出了全新的移動出行服務“Audiondemand移動出行”,又是,又是移動出行,這個名字一看就很洋氣。
1900/1/1 0:00:00近日,中山市發布《中山市“十三五”控制溫室氣體排放工作實施方案的通知》,鼓勵使用節能、清潔能源和新能源運輸工具,加快充換電等配套基礎設施建設。
1900/1/1 0:00:00