9月14日,百度副總裁、智能駕駛事業群總經理李振宇在“百度Apollo媒體溝通會”上宣布,Apollo車路協同方案將于2018年底正式開啟,百度Apollon在車路協同領域的技術和服務將向行業開放,使自動駕駛進入“智能汽車”與“智能道路”相互協作的新階段,全面構建“人車路”全球數據感知。

百度副總裁、智能駕駛事業群總經理李振宇宣布,Apollo的車路協同開源方案“就像一百多年前,有車有路,然后有交通規則。”如今,百度在行業內較早開發出了自動駕駛汽車。這樣的智能汽車不能在上個世紀的道路上行駛,但只有當它們在匹配的“智能”道路上行駛時,才能發揮最大的作用。”李振宇介紹了百度研發“車路協同”的思維背景。事實上,早在2016年,百度就開始布局“車路協調”的全棧研發”,可以說是業內最早布局車路協同的公司之一,在場景數據和測試里程的積累方面取得了階段性進展。截至目前,Apollo不僅擁有北京、雄安、硅谷等多樣化的區域場景;乘用車、無人小巴、無人物流車等車型;領先的車路在路側傳感傳感器方案、路側傳感算法、車側傳感融合算法、數據壓縮與通信優化、V2X終端軟硬件、V2X安全等方面也開發了協同全棧技術。此外,阿波羅擁有的無人車隊、無人車在開放道路上的測試里程。。。一系列場景數據積累為百度布局車路協同和智能交通建設奠定了基礎。從百度大腦開放120個人工智能核心能力,到Apollo與126個合作伙伴開放,開放賦能一直是百度人工智能發展的核心戰略。李振宇表示,Apollo車路協同方案的正式開源是Apollo發展史上的一個重要時刻,標志著Apollo開放平臺進入了車側和路側全面開源的新階段。百度自動駕駛技術總監陶驥分享了百度在車路協同領域研發的關鍵見解,即需要車側、路邊和通信鏈路三管齊下,車側的體驗尤為重要。只有在車端進行多場景實踐,才能對路側傳感設備的精度和通信鏈路的效率提出更準確的要求,驗證路側設備信息反饋的實際效果。

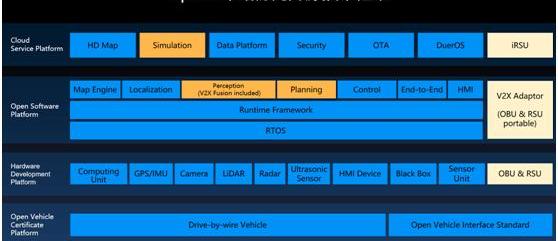
百度自動駕駛技術總監陶驥詳細解釋了Apollo車路協同的開源解決方案。陶驥進一步介紹,Apollo的車路協同開源將基于Apollo開放平臺現有的四層開放技術框架,在軟件、硬件和云服務方面。增加或升級車路協同的相關模塊。在參考硬件層,Apollo將增加車端和路邊的參考硬件,以完成自動駕駛汽車與路邊之間的信息傳輸和分析。在開源軟件層,Apollo升級了感知和決策規劃模塊,可以完成Apollo系統中V2X相關信息的融合處理。同時,它提供了一個可以在車端和路邊的參考硬件上運行的軟件包,并負責V2X信息的相關預處理。在云服務層,開放智能路側服務,提供自動駕駛所需的路側感知預測等信息,以及開源的路側認知預測算法;
提升仿真服務能力,拓展車路協同環境下的仿真場景。所有這些都將有助于開發商和企業在更高水平上進行合作和創新,無需重復制造輪子。
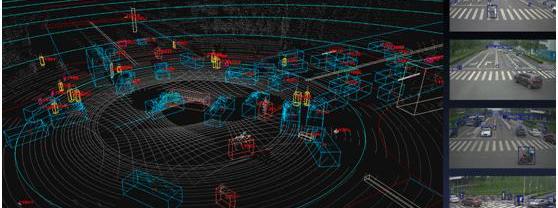
對于Apollo車路協同開源解決方案的社會和交通價值,李振宇比較說,如果百度過去自動駕駛的價值是讓路上的車輛由“二十歲的司機”駕駛,那么車路協同就像為每輛車配備一名“大開眼界”的交警,誰將從“完美”的角度保證安全、分流交通和有效分配道路資源。以一個交通狀況復雜的十字路口為例。由于視角和視線的限制,自動駕駛汽車的人類駕駛員和車載傳感器只能感知部分道路信息,而那些看不見的障礙物會造成隱患。如果車輛和道路都配備了“完美視角”的路邊傳感設備,那么通過使用高清攝像頭等各種傳感器和百度大腦的計算識別能力,可以對路口的所有交通參與者進行傳感,并實現各種分析功能。通過V2X通信將這些信息實時共享給路口的所有車輛,可以最大限度地消除隱患。
“完美視角”可以極大地提高自動駕駛的安全性。據估計,車路協同可以幫助解決54%的自行車智能在道路測試中遇到的問題,并將自行車智能的接管次數減少62%,這相當于為自動駕駛的安全增加了一層冗余保障。

百度在測試現場路口安裝的路邊感應設備李振宇進一步闡述了開源的價值。過去,“通信制造商不熟悉自動駕駛的要求,自動駕駛制造商不容易獲得新興的通信技術服務,道路設備制造商不擅長AI算法研發”。進行車路協調就像“盲人碰大象”。然而,要發展汽車和道路之間的協同作用,我們必須同時擁抱智能汽車和智能道路。未來,百度將通過開放自己的車路協同方案,分享在大量自動駕駛道路測試中積累的實踐經驗和能力,讓所有參與車路協同研發的合作伙伴真正兩條腿走路,基于車路協同,共同打造具有中國特色的自動駕駛落地道路。目前,城市交通擁堵問題越來越嚴重。據統計,北京人平均每天上班時間超過一匹馬半(26.4公里)。目前,交通系統還不夠完善,人們在路上所感受到的是涉水而過,甚至是在浪費生命。對此,李振宇提到,車路協同致力于實現更高效、更安全、更智能的交通組織與協調,從“適應未來”到“調整未來”。百度逐步將開源能力賦能到公交、租賃、物流、自動停車、無人車連接等場景,幫助大城市居民與行業合作伙伴共同提升通勤幸福感。據估計,只有自動停車才能將車主的出行效率提高30%。

車路協同將加速自動駕駛的大規模落地。同日,百度還宣布,將基于全球領先的Apollo開放平臺強大的生態能力,與大唐電信集團、千方科技、中國聯通等產業鏈關鍵環節的代表性企業合作,全面整合汽車制造資源,交通基礎設施設備制造與集成、通信、芯片、政府和大學共同開發智能汽車基礎設施合作系統。百度也將與xion合作……
新區先行先試,進一步探索車路協同的交通發展新路徑。同時,將與同濟大學建立聯合實驗室,在無人車路網規劃設計和交通流模擬等方面開展深入合作。

國家發展改革委城市和小城鎮改革發展中心智慧城市研究所所長李明認為,近年來,隨著一些智能交通領域關鍵技術的突破,在可預見的未來,自動駕駛和車路協同等新技術有望進入大規模應用,這將給當前的交通系統帶來顛覆性的變化。國家高度重視智能交通系統的研究和推廣。目前,百度已經宣布了進一步的開源車路協同方案,可以直接加速自動駕駛技術的成熟,促進智能交通的扎實落地,對推動中國智能交通產業升級具有重要價值。9月14日,百度副總裁、智能駕駛事業群總經理李振宇在“百度Apollo媒體溝通會”上宣布,Apollo車路協同方案將于2018年底正式開啟,百度Apollon在車路協同領域的技術和服務將向行業開放,使自動駕駛進入“智能汽車”與“智能道路”相互協作的新階段,全面構建“人車路”全球數據感知。
百度副總裁、智能駕駛事業群總經理李振宇宣布,Apollo的車路協同開源方案“就像一百多年前,有車有路,然后有交通規則。”如今,百度在行業內較早開發出了自動駕駛汽車。這樣的智能汽車不能在上個世紀的道路上行駛,但只有當它們在匹配的“智能”道路上行駛時,才能發揮最大的作用。”李振宇介紹了百度研發“車路協同”的思維背景。事實上,早在2016年,百度就開始布局“車路協調”的全棧研發“,可以說是業內最早布局車路協同的公司之一,在場景數據和測試里程的積累方面取得了階段性進展。截至目前,Apollo不僅擁有北京、雄安、硅谷等多樣的區域場景;乘用車、無人小巴、無人物流車等車型;
在路側傳感傳感器方案、路側傳感算法、車側傳感融合算法、數據壓縮與通信優化、V2X終端軟硬件、V2X安全等方面,也開發了領先的車路協同全棧技術。此外,阿波羅擁有的無人車隊、無人車在開放道路上的測試里程。。。一系列場景數據積累為百度布局車路協同和智能交通建設奠定了基礎。從百度大腦開放120個人工智能核心能力,到Apollo與126個合作伙伴開放,開放賦能一直是百度人工智能發展的核心戰略。李振宇表示,Apollo車路協同方案的正式開源是Apollo發展史上的一個重要時刻,標志著Apollo開放平臺進入了車側和路側全面開源的新階段。百度自動駕駛技術總監陶驥分享了百度在車路協同領域研發的關鍵見解,即需要車側、路邊和通信鏈路三管齊下,車側的體驗尤為重要。只有在車端進行多場景實踐,才能對路側傳感設備的精度和通信鏈路的效率提出更準確的要求,驗證路側設備信息反饋的實際效果。
百度自動駕駛技術總監陶驥詳細解釋了Apollo車路協同的開源解決方案。陶驥進一步介紹,Apollo的車路協同開源將基于Apollo開放平臺現有的四層開放技術框架,在軟件、硬件和云服務方面。增加或升級車路協同的相關模塊。在參考硬件層,Apollo將增加車端和路邊的參考硬件,以完成自動駕駛汽車與路邊之間的信息傳輸和分析。在開源軟件層,Apollo升級了感知和決策規劃模塊,可以完成Apollo系統中V2X相關信息的融合處理。同時,它提供了一個可以在車端和路邊的參考硬件上運行的軟件包,并負責V2X信息的相關預處理。在云服務層,開放智能路側服務,提供自動駕駛所需的路側感知預測等信息,以及開源的路側認知預測算法;
提升仿真服務能力,拓展車路協同環境下的仿真場景。所有這些都將有助于開發商和企業在更高水平上進行合作和創新,無需重復制造輪子。
對于Apollo車路協同開源解決方案的社會和交通價值,李振宇比較說,如果百度過去自動駕駛的價值是讓路上的車輛由“二十歲的司機”駕駛,那么車路協同就像為每輛車配備一名“大開眼界”的交警,誰將從“完美”的角度保證安全、分流交通和有效分配道路資源。以一個交通狀況復雜的十字路口為例。由于視角和視線的限制,自動駕駛汽車的人類駕駛員和車載傳感器只能感知部分道路信息,而那些看不見的障礙物會造成隱患。如果車輛和道路都配備了“完美視角”的路邊傳感設備,那么通過使用高清攝像頭等各種傳感器和百度大腦的計算識別能力,可以對路口的所有交通參與者進行傳感,并實現各種分析功能。通過V2X通信將這些信息實時共享給路口的所有車輛,可以最大限度地消除隱患。
“完美視角”可以極大地提高自動駕駛的安全性。據估計,車路協同可以幫助解決54%的自行車智能在道路測試中遇到的問題,并將自行車智能的接管次數減少62%,這相當于為自動駕駛的安全增加了一層冗余保障。
百度在測試現場路口安裝的路邊感應設備李振宇進一步闡述了開源的價值。過去,“通信制造商不熟悉自動駕駛的要求,自動駕駛制造商不容易獲得新興的通信技術服務,道路設備制造商不擅長AI算法研發”。進行車路協調就像“盲人碰大象”。然而,要發展汽車和道路之間的協同作用,我們必須同時擁抱智能汽車和智能道路。未來,百度將通過開放自己的車路協同方案,分享在大量自動駕駛道路測試中積累的實踐經驗和能力,讓所有參與車路協同研發的合作伙伴真正兩條腿走路,基于車路協同,共同打造具有中國特色的自動駕駛落地道路。目前,城市交通擁堵問題越來越嚴重。據統計,北京人平均每天上班時間超過一匹馬半(26.4公里)。目前,交通系統還不夠完善,人們在路上所感受到的是涉水而過,甚至是在浪費生命。對此,李振宇提到,車路協同致力于實現更高效、更安全、更智能的交通組織與協調,從“適應未來”到“調整未來”。百度逐步將開源能力賦能到公交、租賃、物流、自動停車、無人車連接等場景,幫助大城市居民與行業合作伙伴共同提升通勤幸福感。據估計,只有自動停車才能將車主的出行效率提高30%。
車路協同將加速自動駕駛的大規模落地。同日,百度還宣布,將基于全球領先的Apollo開放平臺強大的生態能力,與大唐電信集團、千方科技、中國聯通等產業鏈關鍵環節的代表性企業合作,全面整合汽車制造資源,交通基礎設施設備制造與集成、通信、芯片、政府和大學共同開發智能汽車基礎設施合作系統。百度也將與xion合作……
新區先行先試,進一步探索車路協同的交通發展新路徑。同時,將與同濟大學建立聯合實驗室,在無人車路網規劃設計和交通流模擬等方面開展深入合作。
國家發展改革委城市和小城鎮改革發展中心智慧城市研究所所長李明認為,近年來,隨著一些智能交通領域關鍵技術的突破,在可預見的未來,自動駕駛和車路協同等新技術有望進入大規模應用,這將給當前的交通系統帶來顛覆性的變化。國家高度重視智能交通系統的研究和推廣。目前,百度已經宣布了進一步的開源車路協同方案,可以直接加速自動駕駛技術的成熟,促進智能交通的扎實落地,對推動中國智能交通產業升級具有重要價值。
9月14日,奧迪中國在無錫正式獲得了公共道路及高速公路自動駕駛測試牌照(L4級)。
1900/1/1 0:00:00據外媒報道,當地時間9月14日,現代汽車集團任命鄭義宣(EuisunChung)為首席副董事長,使其離接替其父鄭夢九(MongKooChung)現代汽車最高領導人的位置又前進了一步。
1900/1/1 0:00:002018年9月12日,我國超級電容領域的領軍企業,
1900/1/1 0:00:00由中國機械工業聯合會和上海市浦東新區人民政府特別支持,
1900/1/1 0:00:009月14日,Uber宣布該公司將在多倫多投資逾15億美元支持無人駕駛汽車研究。
1900/1/1 0:00:00“對新能源汽車來說,大企業擴展產能非常容易,但小車企由于產能不夠,再興起也沒用,等補貼停掉,最后還是會倒閉。
1900/1/1 0:00:00