一、前言傳統導航地圖主要用于日常生活中導航和查詢地理信息,出行人群是其主要服務對象。基于人類自身的視覺識別能力和邏輯思維能力,許多道路信息被簡化了。隨著互聯網時代的快速發展,提出了更多新的基于位置的服務和產業,如“互聯網+”智能交通和無人系統。國家發改委為促進智能交通發展提出的“互聯網+”便捷交通實施計劃已正式發布。這些服務是依托互聯網進行的,因此地圖的服務對象不再僅僅是人,而是逐漸向機器過渡,這對地圖的準確性、內容結構和計算模式提出了新的要求。(1) 地圖的精度普通導航地圖的精度約為5米,只描繪了道路的位置和形狀,沒有反映道路的詳細信息,因此無法準確知道車輛的位置。
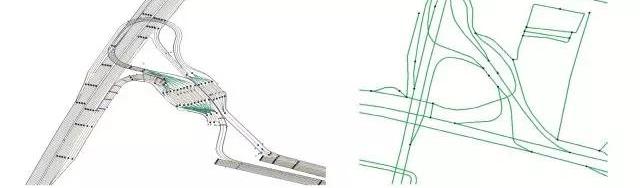
圖1是高精度道路導航地圖與普通導航地圖的對比示意圖。然而,高精度道路導航地圖的絕對精度優于1米,相對精度達到10-20厘米,其中包含了非常豐富的信息,如車道、車道邊界、車道中心線和車道限制信息,如圖1所示。(二) 地圖內容結構高精度道路導航地圖更真實地反映了道路的實際風格,因此它包含了更多的圖層和道路數據,圖層描述也更詳細。高精度道路導航地圖不僅具有更高的坐標,而且具有更精確的道路形狀。同時,還添加了每條車道的坡度、曲率、航向和高程。此外,車道之間的車道線(虛線、實線、單線和雙線)、車道線顏色(白色和黃色)、道路隔離帶、隔離帶材料、道路箭頭、文本內容和位置需要在高精度道路導航地圖中詳細描述。(3) 計算模式高精度道路導航地圖的數據量是普通地圖的10.5倍甚至更多。目前,以云計算為核心的集中式大數據處理模式已無法滿足需求。隨著物聯網和5G通信技術的快速發展,邊緣計算這一基于云的協同計算方法被提出,眾包任務發布模式也被應用于許多行業。因此,高精度道路導航地圖的大數據處理模式可以采用眾包+邊緣計算的模式。第二,相關現狀隨著智能交通和自動駕駛的快速發展,現有的通用導航地圖在內容、準確性和完整性方面都無法滿足高水平的應用要求。道路高精度電子地圖已逐漸被提出并得到廣泛認可[3,4]。目前,在輔助駕駛系統和自動駕駛領域,有許多關于使用高精度道路導航地圖數據的研究。例如,根據高精度道路導航地圖,研究信息行為和車輛定位[5,6],將高精度道路導航圖信息用于輔助駕駛和自動駕駛系統,并在其上進行自動駕駛車道軌跡引導方法的研究[7,8]。建立高精度道路導航地圖的方法也有很多,例如通過配備GPS-RTK的采集車收集特定路線的數據;使用激光雷達和廣角相機提取道路信息,并配備高精度全球衛星導航系統(GNSS),可以達到10厘米的精度,但這種獲取方案成本高昂;
一些研究人員還提出了使用低成本傳感器創建車道級地圖的方法,并通過緊密耦合GPS/INS從正射影像地圖中獲取相關地圖信息。目前,國內外越來越多的公司從事高精度電子地圖的測繪和生產。在谷歌和戴姆勒無人駕駛汽車的開發過程中,高精度電子地圖是重要組成部分。2015年,奧迪、寶馬和戴姆勒聯合斥資31億美元購買了諾基亞Here地圖,為開發高精度道路導航地圖做準備。2015年,高精度道路導航地圖已應用于特定場景。2011年,寶馬的3系賽道教練機和奧迪的RS7都使用高精度道路導航地圖技術在拉古納塞卡和霍根海姆成功運行了賽道。自2016年以來,許多互聯網公司通過收購獲得了地圖數據資源,然后結合自己的算法和云計算能力,生產出高精度的道路導航地圖,如谷歌、優步、百度和阿里。與此同時,汽車公司已經開始依賴第三方地圖服務。2017年初,Mobileye與大眾、寶馬和日產簽署了一項協議。前者將為三大汽車巨頭提供地圖產品,而汽車制造商將負責為Mobileye提供更多地圖數據。三、需求分析與建模基于“互聯網+”智能交通應用的典型應用場景和未來20年無人系統產業的發展,本文將高精度道路導航地圖分為六層,建立需求模型,如圖2所示。
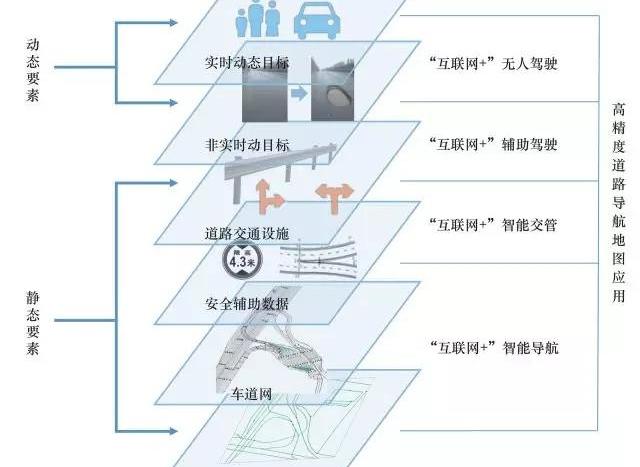
圖2高精度道路導航地圖應用分析(一)“互聯網+”智能導航隨著城市環境的不斷建設,許多新的交通管理措施不斷實施,以提高道路使用效率,緩解擁堵。如多人車道(HOV車道)、潮汐車道(見圖3)等。

圖3 HOV車道和潮汐車道HOV車道僅供至少有一定數量乘客的車輛使用。潮汐車道是指可變車道,即一條車道的行駛方向在不同的時間段內會發生變化。這些新的交通管理方案的實施主要是通過車道來實現的,高精度的道路導航地圖可以準確地反映這些信息,并為人們提供智能導航服務。(2) “互聯網+”智能交通控制的道路交通執法管理存在諸多困難,尤其是在執法取證和事故應急處理方面。而高精度的道路導航地圖可以為解決交通執法管理中的困難提供新的技術手段。1.交警執法領域車道級違法行為的執法取證是道路執法領域的難題。車道級違法行為是指移動目標的相對位置相對于地面車道或其他移動目標在車道級內移動,違反交通法規的行為,如不在規定車道內行駛。由于數據采集和現場還原難度較大,目前執法取證難度較大。高精度道路導航地圖可以準確反映車輛行駛在哪條車道上,因此可以準確判斷車輛是否存在車道級違法行為,滿足執法和車道級違法取證的需要。2.在保險理賠領域,車險理賠行業長期受到保險欺詐的困擾,耗費了大量的人力物力。這是因為保險人員只能事后調查證據,無法判斷事故的整個過程。高精度道路導航地圖包含豐富而詳細的車道信息,因此可以準確反映車輛的行駛狀態,并在地圖上還原事故的全過程,從而幫助保險公司準確判斷事故。(3) “互聯網+”輔助駕駛/無人駕駛領域要求地圖在幾何上具有更精細的粒度,詳細描述道路上每條車道的詳細信息。在拓撲網絡上,還需要準確地表達車道之間的連接關系。高精度道路導航地圖包含多級g……
度量拓撲數據,可以滿足輔助駕駛和自動駕駛不同級別的應用需求。此外,高精度的道路導航地圖也包含了動態元素。動態元素有兩種,一種是半實時動態元素,主要用于自動駕駛領域的全局路徑規劃;另一種是實時動態元素,主要指動態障礙物,主要用于自動駕駛系統中,實現局部路徑規劃。第四,高精度道路導航地圖的結構和計算(一)高精度道路航行地圖的結構道路地圖反映了實際道路,通過特定的層次描繪了特定的類別,然后將層次疊加起來以表達路面。終端上顯示的導航地圖通常由10層甚至20層不同分辨率的圖片組成。當用戶縮放時,程序會根據縮放系列選擇不同分辨率的瓦片(使用正方形來模擬實體),并將它們拼接成一個完整的地圖。高精度道路導航地圖也是如此,只是它在普通電子地圖的基礎上包含了更多的圖層,每一層都更加詳細。
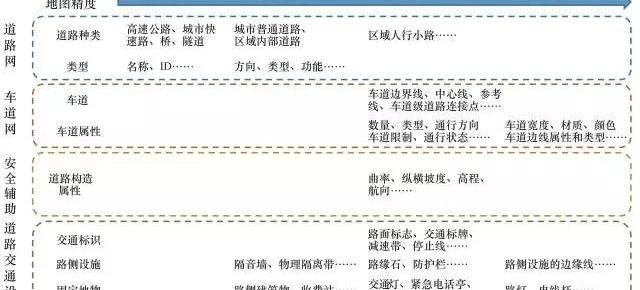
圖4地圖結構內容劃分示意圖高精度道路導航地圖由四部分數據組成,即道路網絡數據、車道網絡數據、安全輔助數據和道路交通設施數據。根據不同的地圖精度,由這四種類型的數據組成的地圖結構的內容是不同的。基本結構劃分和顯示內容示例如圖4所示。道路網絡主要由道路參考線網絡組成,用于描述道路的幾何形狀,表達與道路設施的關系。高精度道路導航地圖道路網絡示意圖,如圖5所示,包括道路基線、道路基線連接點和交叉口等圖層。

圖6高精度道路導航地圖車道網絡示意圖車道網絡記錄了道路網絡中每個獨立車道的相關屬性,用于車道級道路顯示、定位、路徑規劃和駕駛策略輔助。包括車道級道路、車道級道路連接點、車道級公路形狀點等層次,如圖6所示。安全輔助數據和道路交通設施數據描述車道安全數據和車道上的其他交通設施,用于輔助車道級別的定位和顯示,如曲率、航向、垂直和水平坡度等。道路交通設施的數據包括交通標志、路邊設施和固定特征。(2) 計算模式高精度道路導航地圖描繪了更多的道路信息,包含了更多的細節,因此其數據量也更大。傳統導航電子地圖每公里的數據量約為1KB,而高精度道路導航地圖每公里數據量約100MB,是傳統導航地圖的10.5倍。此外,高精度道路導航地圖中的數據類型復雜多樣,數據量急劇增加,數據處理的實時性要求很高。因此,目前以云計算模型為核心的集中式大數據處理模式已不能滿足高精度道路導航地圖的數據計算要求,需要建立新的計算模型。本文提出了眾包+邊緣計算模型作為一種高精度的道路導航地圖計算模型。高精度道路導航地圖的數據采集任務非常艱巨,采集車輛必須穿過每一條道路,然后上傳數據進行繪制。首先,這需要很多時間;
其次,道路上的一些信息會發生變化,高精度的道路導航地圖需要保持定期的數據更新,再次收集大量信息是重復的,消耗更多的資源。作者認為,眾包可以用來解決這些問題,高精度道路導航地圖的用戶也可以成為起草者。通過眾包,使用高精度道路導航地圖將數據采集設備安裝在車輛上,在使用地圖行駛的同時收集數據,并上傳獲得的數據。這種方式可以很好地滿足城市街道每周更新一次的需求,以反映其結構和新的交通模式。美國的Mapper公司已經使用這種方法來獲取地圖數據。隨著物聯網和5G通信技術的快速發展,研究人員提出了一種不同于傳統云計算的新計算模式——邊緣計算。邊緣計算是指在網絡邊緣執行計算的計算模型。在邊緣計算中,邊緣的下行鏈路數據代表云服務,上行鏈路數據代表高精度道路導航地圖服務,而邊緣計算的邊緣是指從數據源到云計算中心的任何計算和網絡資源[14,15]。這種計算方法是一種開放平臺,將對象或數據源附近的網絡、計算、存儲和應用的核心能力集成在一起,并在附近提供邊緣智能服務,以滿足行業數字化在敏捷連接、實時業務、數據優化、應用智能、安全和隱私保護方面的關鍵要求。
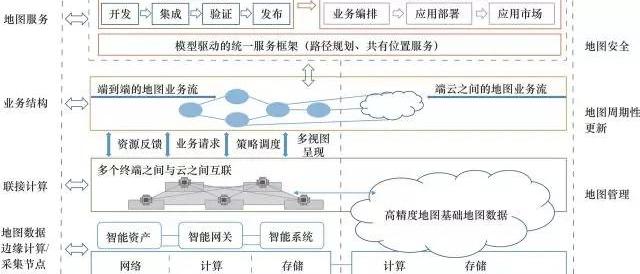
圖7高精度道路導航地圖邊緣計算模型參考框架對于高精度道路航行地圖來說,在邊緣計算中,由于數據量的增加和對實時性的需求,需要將原始云中心的部分計算任務遷移到網絡邊緣設備,以提高數據傳輸性能,確保實時處理,降低云計算中心的計算負載。本文開發了高精度道路導航地圖邊緣計算模型的參考框架,如圖7所示。五、思路(一)標準體系框架目前,國內外從事測繪和制作高精度道路導航地圖的單位越來越多,但各作業單位的技術水平、使用的儀器設備、作業方法、數據處理和成果各不相同。不同企業和機構采用的標準也不一致。
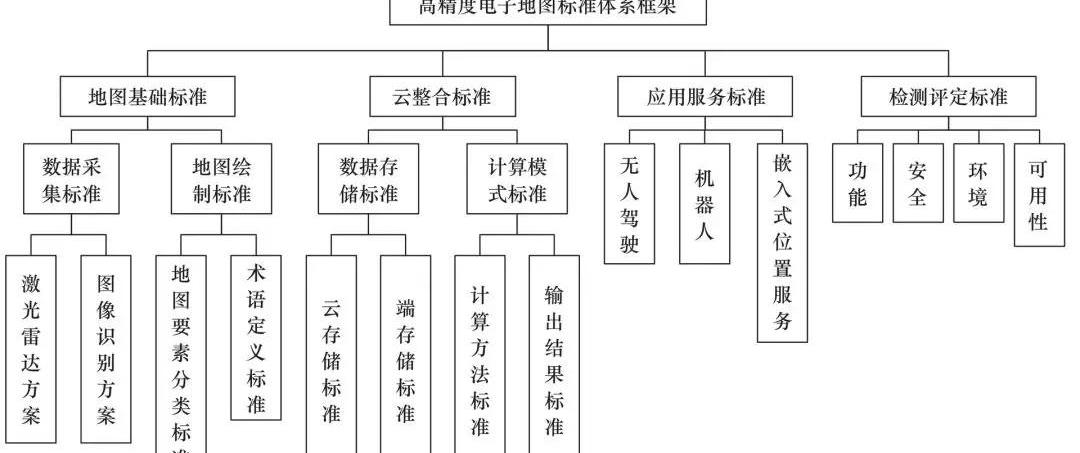
圖8高精度電子地圖標準體系框架給高精度道路導航地圖的管理和共享帶來了問題,因此迫切需要加強高精度道路導航圖標準體系框架的制定。高精度電子地圖標準體系框架是形成高精度電子圖標準體系的基本單元。一、前言傳統導航地圖主要用于日常生活中導航和查詢地理信息,出行人群是其主要服務對象。基于人類自身的視覺識別能力和邏輯思維能力,許多道路信息被簡化了。隨著互聯網時代的快速發展,提出了更多新的基于位置的服務和產業,如“互聯網+”智能交通和無人系統。國家發改委為促進智能交通發展提出的“互聯網+”便捷交通實施計劃已正式發布。這些服務是依托互聯網進行的,因此地圖的服務對象不再僅僅是人,而是逐漸向機器過渡,這對地圖的準確性、內容結構和計算模式提出了新的要求。(1) 地圖的精度普通導航地圖的精度約為5米,只描繪了道路的位置和形狀,沒有反映道路的詳細信息,因此無法準確知道車輛的位置。
圖1是高精度道路導航地圖與普通導航地圖的對比示意圖。然而,高精度道路導航地圖的絕對精度更好……
han1m,相對精度達到10-20cm,其中包含非常豐富的信息,如車道、車道邊界、車道中心線和車道限制信息,如圖1所示。(二) 地圖內容結構高精度道路導航地圖更真實地反映了道路的實際風格,因此它包含了更多的圖層和道路數據,圖層描述也更詳細。高精度道路導航地圖不僅具有更高的坐標,而且具有更精確的道路形狀。同時,還添加了每條車道的坡度、曲率、航向和高程。此外,車道之間的車道線(虛線、實線、單線和雙線)、車道線顏色(白色和黃色)、道路隔離帶、隔離帶材料、道路箭頭、文本內容和位置需要在高精度道路導航地圖中詳細描述。(3) 計算模式高精度道路導航地圖的數據量是普通地圖的10.5倍甚至更多。目前,以云計算為核心的集中式大數據處理模式已無法滿足需求。隨著物聯網和5G通信技術的快速發展,邊緣計算這一基于云的協同計算方法被提出,眾包任務發布模式也被應用于許多行業。因此,高精度道路導航地圖的大數據處理模式可以采用眾包+邊緣計算的模式。第二,相關現狀隨著智能交通和自動駕駛的快速發展,現有的通用導航地圖在內容、準確性和完整性方面都無法滿足高水平的應用要求。道路高精度電子地圖已逐漸被提出并得到廣泛認可[3,4]。目前,在輔助駕駛系統和自動駕駛領域,有許多關于使用高精度道路導航地圖數據的研究。例如,根據高精度道路導航地圖,研究信息行為和車輛定位[5,6],將高精度道路導航圖信息用于輔助駕駛和自動駕駛系統,并在其上進行自動駕駛車道軌跡引導方法的研究[7,8]。建立高精度道路導航地圖的方法也有很多,例如通過配備GPS-RTK的采集車收集特定路線的數據;使用激光雷達和廣角相機提取道路信息,并配備高精度全球衛星導航系統(GNSS),可以達到10厘米的精度,但這種獲取方案成本高昂;
一些研究人員還提出了使用低成本傳感器創建車道級地圖的方法,并通過緊密耦合GPS/INS從正射影像地圖中獲取相關地圖信息。目前,國內外越來越多的公司從事高精度電子地圖的測繪和生產。在谷歌和戴姆勒無人駕駛汽車的開發過程中,高精度電子地圖是重要組成部分。2015年,奧迪、寶馬和戴姆勒聯合斥資31億美元購買了諾基亞Here地圖,為開發高精度道路導航地圖做準備。2015年,高精度道路導航地圖已應用于特定場景。2011年,寶馬的3系賽道教練機和奧迪的RS7都使用高精度道路導航地圖技術在拉古納塞卡和霍根海姆成功運行了賽道。自2016年以來,許多互聯網公司通過收購獲得了地圖數據資源,然后結合自己的算法和云計算能力,生產出高精度的道路導航地圖,如谷歌、優步、百度和阿里。與此同時,汽車公司已經開始依賴第三方地圖服務。2017年初,Mobileye與大眾、寶馬和日產簽署了一項協議。前者將為三大汽車巨頭提供地圖產品,而汽車制造商將負責為Mobileye提供更多地圖數據。三、需求分析與建模基于“互聯網+”智能交通應用的典型應用場景和未來20年無人系統產業的發展,本文將高精度道路導航地圖分為六層,建立需求模型,如圖2所示。
圖2高精度道路導航地圖應用分析(一)“互聯網+”智能導航隨著城市環境的不斷建設,許多新的交通管理措施不斷實施,以提高道路使用效率,緩解擁堵。如多人車道(HOV車道)、潮汐車道(見圖3)等。
圖3 HOV車道和潮汐車道HOV車道僅供至少有一定數量乘客的車輛使用。潮汐車道是指可變車道,即一條車道的行駛方向在不同的時間段內會發生變化。這些新的交通管理方案的實施主要是通過車道來實現的,高精度的道路導航地圖可以準確地反映這些信息,并為人們提供智能導航服務。(2) “互聯網+”智能交通控制的道路交通執法管理存在諸多困難,尤其是在執法取證和事故應急處理方面。而高精度的道路導航地圖可以為解決交通執法管理中的困難提供新的技術手段。1.交警執法領域車道級違法行為的執法取證是道路執法領域的難題。車道級違法行為是指移動目標的相對位置相對于地面車道或其他移動目標在車道級內移動,違反交通法規的行為,如不在規定車道內行駛。由于數據采集和現場還原難度較大,目前執法取證難度較大。高精度道路導航地圖可以準確反映車輛行駛在哪條車道上,因此可以準確判斷車輛是否存在車道級違法行為,滿足執法和車道級違法取證的需要。2.在保險理賠領域,車險理賠行業長期受到保險欺詐的困擾,耗費了大量的人力物力。這是因為保險人員只能事后調查證據,無法判斷事故的整個過程。高精度道路導航地圖包含豐富而詳細的車道信息,因此可以準確反映車輛的行駛狀態,并在地圖上還原事故的全過程,從而幫助保險公司準確判斷事故。(3) “互聯網+”輔助駕駛/無人駕駛領域要求地圖在幾何上具有更精細的粒度,詳細描述道路上每條車道的詳細信息。在拓撲網絡上,還需要準確地表達車道之間的連接關系。高精度道路導航地圖包含多級g……
度量拓撲數據,可以滿足輔助駕駛和自動駕駛不同級別的應用需求。此外,高精度的道路導航地圖也包含了動態元素。動態元素有兩種,一種是半實時動態元素,主要用于自動駕駛領域的全局路徑規劃;另一種是實時動態元素,主要指動態障礙物,主要用于自動駕駛系統中,實現局部路徑規劃。第四,高精度道路導航地圖的結構和計算(一)高精度道路航行地圖的結構道路地圖反映了實際道路,通過特定的層次描繪了特定的類別,然后將層次疊加起來以表達路面。終端上顯示的導航地圖通常由10層甚至20層不同分辨率的圖片組成。當用戶縮放時,程序會根據縮放系列選擇不同分辨率的瓦片(使用正方形來模擬實體),并將它們拼接成一個完整的地圖。高精度道路導航地圖也是如此,只是它在普通電子地圖的基礎上包含了更多的圖層,每一層都更加詳細。
圖4地圖結構內容劃分示意圖高精度道路導航地圖由四部分數據組成,即道路網絡數據、車道網絡數據、安全輔助數據和道路交通設施數據。根據不同的地圖精度,由這四種類型的數據組成的地圖結構的內容是不同的。基本結構劃分和顯示內容示例如圖4所示。道路網絡主要由道路參考線網絡組成,用于描述道路的幾何形狀,表達與道路設施的關系。高精度道路導航地圖道路網絡示意圖,如圖5所示,包括道路基線、道路基線連接點和交叉口等圖層。
圖6高精度道路導航地圖車道網絡示意圖車道網絡記錄了道路網絡中每個獨立車道的相關屬性,用于車道級道路顯示、定位、路徑規劃和駕駛策略輔助。包括車道級道路、車道級道路連接點、車道級公路形狀點等層次,如圖6所示。安全輔助數據和道路交通設施數據描述車道安全數據和車道上的其他交通設施,用于輔助車道級別的定位和顯示,如曲率、航向、垂直和水平坡度等。道路交通設施的數據包括交通標志、路邊設施和固定特征。(2) 計算模式高精度道路導航地圖描繪了更多的道路信息,包含了更多的細節,因此其數據量也更大。傳統導航電子地圖每公里的數據量約為1KB,而高精度道路導航地圖每公里數據量約100MB,是傳統導航地圖的10.5倍。此外,高精度道路導航地圖中的數據類型復雜多樣,數據量急劇增加,數據處理的實時性要求很高。因此,目前以云計算模型為核心的集中式大數據處理模式已不能滿足高精度道路導航地圖的數據計算要求,需要建立新的計算模型。本文提出了眾包+邊緣計算模型作為一種高精度的道路導航地圖計算模型。高精度道路導航地圖的數據采集任務非常艱巨,采集車輛必須穿過每一條道路,然后上傳數據進行繪制。首先,這需要很多時間;
其次,道路上的一些信息會發生變化,高精度的道路導航地圖需要保持定期的數據更新,再次收集大量信息是重復的,消耗更多的資源。作者認為,眾包可以用來解決這些問題,高精度道路導航地圖的用戶也可以成為起草者。通過眾包,使用高精度道路導航地圖將數據采集設備安裝在車輛上,在使用地圖行駛的同時收集數據,并上傳獲得的數據。這種方式可以很好地滿足城市街道每周更新一次的需求,以反映其結構和新的交通模式。美國的Mapper公司已經使用這種方法來獲取地圖數據。隨著物聯網和5G通信技術的快速發展,研究人員提出了一種不同于傳統云計算的新計算模式——邊緣計算。邊緣計算是指在網絡邊緣執行計算的計算模型。在邊緣計算中,邊緣的下行鏈路數據代表云服務,上行鏈路數據代表高精度道路導航地圖服務,而邊緣計算的邊緣是指從數據源到云計算中心的任何計算和網絡資源[14,15]。這種計算方法是一種開放平臺,將對象或數據源附近的網絡、計算、存儲和應用的核心能力集成在一起,并在附近提供邊緣智能服務,以滿足行業數字化在敏捷連接、實時業務、數據優化、應用智能、安全和隱私保護方面的關鍵要求。
圖7高精度道路導航地圖邊緣計算模型參考框架對于高精度道路航行地圖來說,在邊緣計算中,由于數據量的增加和對實時性的需求,需要將原始云中心的部分計算任務遷移到網絡邊緣設備,以提高數據傳輸性能,確保實時處理,降低云計算中心的計算負載。本文開發了高精度道路導航地圖邊緣計算模型的參考框架,如圖7所示。五、思路(一)標準體系框架目前,國內外從事測繪和制作高精度道路導航地圖的單位越來越多,但各作業單位的技術水平、使用的儀器設備、作業方法、數據處理和成果各不相同。不同企業和機構采用的標準也不一致。
圖8高精度電子地圖標準體系框架給高精度道路導航地圖的管理和共享帶來了問題,因此迫切需要加強高精度道路導航圖標準體系框架的制定。高精度電子地圖標準體系框架是形成高精度電子圖標準體系的基本單元。它包括四個部分:地圖基礎標準、云集成標準、應用服務標準和檢測與評估標準,如圖8所示。(二) 隱私和安全由于國家安全的考慮,許多國家對公共地圖的信息收集和繪制也有許多規定,包括準確性、測繪區域、機構和人員等許多限制。因此,有必要進一步規范公共地圖信息采集和高精度道路導航地圖數據保護政策,在保障信息安全和鼓勵高精度道路導圖技術發展之間找到最佳平衡點和解決方案。(3) 坐標系的開放性傳統的導航地圖有傳統的加密方法,如電子地圖版本審查和偏移措施,但現在這些地圖加密方法與高精度道路導航地圖之間存在矛盾。因此,在未來的發展中,我們應該對高精度道路導航地圖有創新的思考,實際應用的導航定位服務是本地的。也許我們可以嘗試用相對坐標系來解決定位精度的安全問題。(4) 及時準確地更新數據傳統的導航地圖由其商業地圖公司及時準確地進行更新,從而確保導航服務的準確性。……的更新過程……
高精度道路導航地圖不僅包括道路/車道的幾何信息,還包括大量的數據更新,包括交通元素。而且,高精度道路導航地圖本身包含著大量的數據,如果每次都用原始采集手段更新數據,會導致數據冗余過多,成本過高。因此,在未來高精度道路導航地圖的發展中,眾包是一種更方便、更便宜、更可靠的手段,可以在用戶手中獲得大量及時的數據。它包括四個部分:地圖基礎標準、云集成標準、應用服務標準和檢測與評估標準,如圖8所示。(二) 隱私和安全由于國家安全的考慮,許多國家對公共地圖的信息收集和繪制也有許多規定,包括準確性、測繪區域、機構和人員等許多限制。因此,有必要進一步規范公共地圖信息采集和高精度道路導航地圖數據保護政策,在保障信息安全和鼓勵高精度道路導圖技術發展之間找到最佳平衡點和解決方案。(3) 坐標系的開放性傳統的導航地圖有傳統的加密方法,如電子地圖版本審查和偏移措施,但現在這些地圖加密方法與高精度道路導航地圖之間存在矛盾。因此,在未來的發展中,我們應該對高精度道路導航地圖有創新的思考,實際應用的導航定位服務是本地的。也許我們可以嘗試用相對坐標系來解決定位精度的安全問題。(4) 及時準確地更新數據傳統的導航地圖由其商業地圖公司及時準確地進行更新,從而確保導航服務的準確性。高精度道路導航地圖的更新過程不僅包括道路/車道的幾何信息,還包括包括交通要素在內的大量數據更新。此外,高精度道路導航地圖本身包含大量數據,如果每次都用原始采集手段更新數據,會導致數據冗余過多,成本過高。因此,在未來高精度道路導航地圖的發展中,眾包是一種更方便、更便宜、更可靠的手段,可以在用戶手中獲得大量及時的數據。
近期,越博動力全資子公司南京越博電驅動系統有限公司(以下簡稱越博電驅動)申報的“高性能一體化電驅動系統數字化車間新模式”項目獲國家工信部立項,
1900/1/1 0:00:00近日,連云港市人民政府發布《連云港市新能源汽車推廣應用方案2018年度》,2018年,連云港市推廣應用新能源汽車2000輛標準車以上,建設新能源汽車充電設施1100個以上。
1900/1/1 0:00:00美國連鎖超市巨頭克羅格公司Kroger今日與自動駕駛初創公司Nuro聯合發布了一項全自動駕駛汽車送貨服務。這項服務將于今年秋季試運行,具體在哪些城市推出尚未公布。
1900/1/1 0:00:00在我國新能源汽車產業發展過程中,動力電池產業發展路線一直以來多有爭議。目前備受推崇的鋰電池,行業不少人士認為這一領域也存在天花板。
1900/1/1 0:00:006月28日,上海市經信委發布《上海市新能源汽車車型申請信息(2018年16月)》,共有40款新能源汽車在列。
1900/1/1 0:00:00近日,駐馬店市人民政府辦公室關于印發《2018年駐馬店市新能源汽車推廣應用實施方案的通知》,該通知明確表示駐馬店市2018年推廣應用新能源汽車2300輛。
1900/1/1 0:00:00