6月28日,在2018智能汽車跨界融合高峰論壇上,車和家汽車駕駛總監郎賢鵬首次介紹了公司的無人駕駛戰略和共享出行戰略。車與家共享出行的最終目標是打造一款為共享出行定制的無人駕駛Robo出租車,其自動駕駛水平可達到SAE L4。首批生產車輛計劃于2025年投入商業運營,每天為用戶提供1億公里的出行服務。企業戰略目標自今年1月以來,車和家選擇了一支自建團隊,負責自動駕駛共享出行解決方案的設計、研發和產品化。曾在百度L3部門工作的郎賢鵬加入車和家,擔任自動駕駛部門負責人。現在核心團隊已經基本組建完成,算法、數據和服務的相關負責人已經到位。在多家車企公布的自動駕駛時間表中,車和家的目標似乎是一個相對具體的計劃,即為移動出行打造Robo出租車(SAE L4),該出租車將在2025年前量產并投入商業運營,每天為用戶提供1億公里的出行服務。與許多公司試水和自動駕駛研發的做法不同,車和將無人駕駛Robo出租車提升為公司的戰略目標。郎賢鵬向車云指出,到2025年,汽車和家庭將不再生產試運營的“半成品”,而是可以正式投入商業運營的量產車。盡管在過渡期間可能會有一名安保人員跟隨汽車,但最終目標必須是一輛沒有司機的無人駕駛出租車。機器人出租車被視為公司內部的商業化目標。今年3月,車與家牽手的滴滴將在這一商業計劃中發揮重要作用。
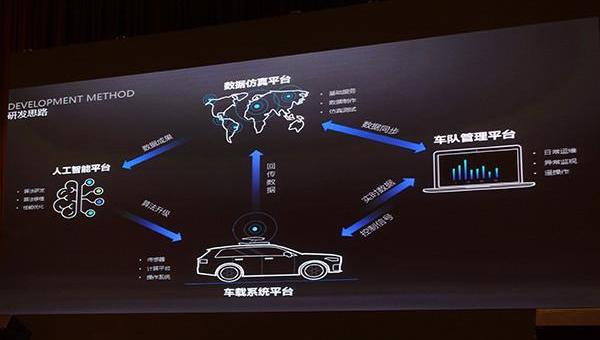
屆時,車和家提供的自動駕駛系統將由完整的車載系統平臺、人工智能平臺、數據模擬平臺和車隊管理平臺組成。所有無人駕駛出租車的數據將通過網絡傳輸回數據模擬平臺,人工智能平臺將用于算法的集成和優化。隨著車隊規模的擴大,將有一個車隊管理平臺進行統一管理。“這不僅僅是研發,它只是落地。”郎賢鵬在評價這個目標時說,“事實上,它仍然非常激進。”“軟硬一體化”是最快的方式。與許多提前制定2025年計劃的企業相比,主力軍剛剛到位的汽車和家居的研發面臨著在比其他企業更短的時間內制造出自我認證產品的巨大挑戰。在回答這個問題時,郎賢鵬選擇了“軟硬結合”,在他看來,這是最快的方式。在這個行業中,自動駕駛原型從來都不缺。郎賢鵬告訴車云,快速制造原型車很容易。科技公司通常采用的做法是通過電線購買一輛改裝過的汽車,先做軟件算法,然后將其移植到正式的汽車上。然而,基于不同車輛定制的算法并不是通用的,當它被移植到另一種完全不同的車輛上時,研究人員很容易在硬件適應階段拖延大量時間。郎賢鵬給我們舉了一個簡單的例子:一輛百公里加速3秒的汽車在設計自動駕駛決策規劃算法時,可以選擇在某個場景中超車,但當性能較差的汽車處于同一位置時,它只能跟車。汽車的性能不同,軟件算法也會相應調整。在郎賢鵬看來,找一輛Demo車先做軟件算法,然后移植,并不是一個特別好的研發理念。
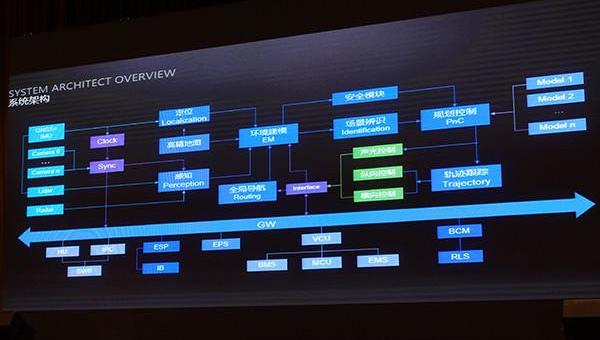
Robo taxi的全系統架構汽車和該家族采用的“軟硬一體”自動駕駛儀研發理念是,有必要從一開始就明確這款汽車是什么樣的自動駕駛儀,整個汽車從設計開始就在為最終目標服務,底盤、執行器和電源的冗余設計,以及室內空間的設計。傳感器的位置、類型、計算平臺和算法的選擇……
與車輛硬件并行開發,并且沒有順序關系。盡管時間緊迫,任務繁重,但汽車和家人還是選擇從零開始,開發一款自動駕駛汽車。當然,為了搶占2025年的時間節點,汽車和家居在效率最大化方面也考慮了一些豐富的方案。據郎賢鵬介紹,該公司即將推出的首款SUV將配備自動駕駛L2.5系統,該系統在功能上與特斯拉的自動駕駛系統相似。易航智能科技有限公司有限公司由車合佳投資,主要負責研發。在Robo出租車的發展過程中,這款車將承擔非常重要的駕駛行為數據收集。在這款車上市之前,郎賢鵬團隊將完成數據平臺的建設,以確保明年新車上市時數據能夠準確傳回,OTA功能將首先在這款車上使用。同時,該團隊將在第一款SUV框架的基礎上,對第一批自動駕駛汽車進行改革。這些Demo汽車的主要功能是通信數據服務、存儲、分發和生產等技術,并完成算法一些常見部分的準備工作。在2019年上半年推出用于網絡汽車的Robo打車后,上述常見的基礎能力將移植到定制的Robo出租車上,并在官方汽車上進行后續的算法開發。接下來的工作也有了具體的時間表:在2019年左右Robo出租車原型完成后,車和家將在2020年完成車輛的整體設計,在1-2年內改進算法,并在2023-2025年開始量產。雖然時間很短,但郎賢鵬認為,“只要軟硬件的節奏能跟上,還是很有希望的”。類人決策自動駕駛有一個龐大的產業鏈,每個角色都扮演著自己的角色。在時間和人力有限的情況下,汽車和家庭自己選擇的核心能力是規劃決策算法。L2和L3自動駕駛儀主要是感知和執行技術。對于L4級自動駕駛來說,這兩項技術已經接近成熟。決策規劃問題仍未解決。與L2和L3自動駕駛可以由人類干預相比,L4自動駕駛完全由系統控制,這也對決策和規劃能力提出了更高的要求。這是一個簡短的背景介紹。目前,規劃決策算法需要大量的駕駛行為數據進行訓練,有兩個研究方向,一個是完全基于規則的,另一個是基于學習的。前者用數學公式設計車輛在特定場景下的決策,哪些情況下可以超車,哪些結果選擇跟車。基于規則的優勢在于確定性,但世界是復雜多變的,因此很難窮盡所有場景并構建公式來描述它們。基于深度學習的方法是指通過向系統“饋送”足夠的數據,對系統的正確或錯誤做法建立獎懲機制,并增加判斷。隨著時間的推移,該算法可以在不同的情況下給出最優解。這種方法的缺點是,系統通過學習在某個參數下獲得了良好的性能,但當出現安全問題時,無法解釋原因,也無法解決問題。由于駕駛環境的復雜性,僅使用上述方法之一很難兼顧所有駕駛場景并確保安全。
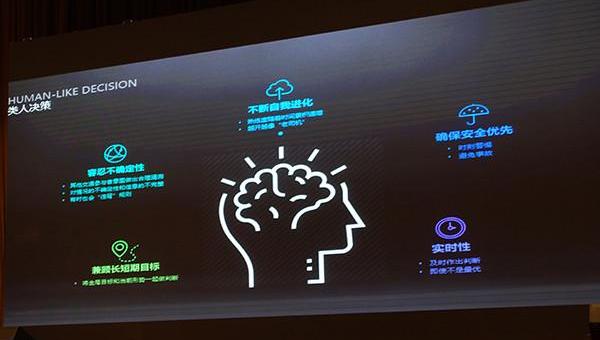
在談到車和佳的算法研發思路時,郎賢鵬建議車和佳在未來的決策規劃和開發中,將采用類人思維進行決策研發,讓自動駕駛像人一樣思考,既能保證安全優先,容忍不確定性,又能不斷進化,考慮長期和短期目標,并及時做出判斷。其中,在確保安全優先的情況下,汽車和家庭的理念是為安全相關部分制定規則,例如汽車不能開到路邊,不能左轉進入逆行車道。。。工程師們用數學公式來表達這些與安全相關的部分,并制定一些強制性規則。通過基于深度學習的方法實現了與安全無關的駕駛舒適性內容。這種方法可以確保安全……
ted部件更加可控和直觀,與舒適性相關的部件更加靈活。同時,在一些決策算法的設計上,郎賢鵬希望能有更多深思熟慮的考慮。工程師將考慮長期和短期目標來做出決策。一個例子是,在高速公路上跟車時,是向左變道還是向右變道取決于車輛是否應該從附近的匝道離開高速公路。當你掌握了更多的全球信息,你就會做出更明智的決定。郎賢鵬告訴我們,在總體規劃中,對于核心決策規劃部分,車和嘉的總體規劃是降低深度學習算法的比例,并在研發過程中,嘗試對一些現在無法描述的事情逐漸形成規則。這一切的出發點是因為自動駕駛汽車是一種基于安全的產品。數據,數據,數據在談到生命數據時,郎賢鵬提到了自己對自動駕駛產品化的思考。無論是汽車和家庭使用首款SUV所做的數據準備,還是決策規劃算法的訓練需求,大量真實的人類駕駛數據都是自動駕駛產品落地的關鍵,也是每個企業都想牢牢掌握在手中的寶貴資源。郎賢鵬在強調數據的重要性時指出,“沒有數據,所有計劃都是紙上談兵”。

汽車和家庭的完整數據流。他對數據重要性的理解來自于之前的研究和開發經驗。郎賢鵬曾使用開源算法的改進代碼框架,在訓練數據較少的情況下,識別率僅為80%-85%。然而,在海量數據的訓練下,97%的識別率為-99%,在某些研究領域的性能與創新算法相當甚至超過。科學研究和產品也有相似之處。在科學研究領域,如果你有十公里的數據,你可以寫一篇學術論文。如果你有一百公里的數據,它已經是一個非常豐富的紙質材料了。很少看到基于數千公里數據的科學研究論文。郎賢鵬說:“科學研究所需的數據量與制造自動駕駛產品所需的數量完全不同。”。這也讓他明白了數據在產品化過程中的重要性。科技公司很難找到不同的人在真實場景中做大量的駕駛測試,并為自己積累數據。盡管雇傭測試人員有機會積累大量數據,但也很難避免數據的同質化——不同的人會有不同的駕駛習慣和方法,更不用說地理覆蓋的問題了。汽車公司擁有最多的數據資源,他們也可以考慮回收數據的多樣性。而且,汽車和家庭將有一整套數據采集、收集和生產的流程,以確保數據能夠在自動駕駛算法的訓練中更好地發揮作用。第一輛SUV上市后,后臺將開始獲取車輛返回的駕駛數據和環境數據。據郎顯鵬估計,到2021,預計將有數百億公里的數據返回,足以支持自主駕駛算法的研發。總結在演講的最后,郎賢鵬表示,車和嘉的自動駕駛團隊的工作才剛剛開始,在接下來的7-8年里,我希望能非常認真地完成這件事。在某種程度上,汽車和家用自動駕駛項目的順利進行很大程度上取決于首款SUV的市場表現。根據計劃,車和家的首款SUV將是一款續航里程700公里以上的增程電動汽車,將于今年下半年發布,并于2019年正式上市。隨著新車的推出和數據的回歸,希望汽車和家用自動駕駛的研發將迎來更快的發展階段。6月28日,在2018智能汽車跨界融合高峰論壇上,車和家汽車駕駛總監郎賢鵬首次介紹了公司的無人駕駛戰略和共享出行戰略。車與家共享出行的最終目標是打造一款為共享出行定制的無人駕駛Robo出租車,其自動駕駛水平可達到SAE L4。冷杉……
批量生產的汽車計劃于2025年投入商業運營,每天為用戶提供1億公里的出行服務。企業戰略目標自今年1月以來,車和家選擇了一支自建團隊,負責自動駕駛共享出行解決方案的設計、研發和產品化。曾在百度L3部門工作的郎賢鵬加入車和家,擔任自動駕駛部門負責人。現在核心團隊已經基本組建完成,算法、數據和服務的相關負責人已經到位。在多家車企公布的自動駕駛時間表中,車和家的目標似乎是一個相對具體的計劃,即為移動出行打造Robo出租車(SAE L4),該出租車將在2025年前量產并投入商業運營,每天為用戶提供1億公里的出行服務。與許多公司試水和自動駕駛研發的做法不同,車和將無人駕駛Robo出租車提升為公司的戰略目標。郎賢鵬向車云指出,到2025年,汽車和家庭將不再生產試運營的“半成品”,而是可以正式投入商業運營的量產車。盡管在過渡期間可能會有一名安保人員跟隨汽車,但最終目標必須是一輛沒有司機的無人駕駛出租車。機器人出租車被視為公司內部的商業化目標。今年3月,車與家牽手的滴滴將在這一商業計劃中發揮重要作用。
屆時,車和家提供的自動駕駛系統將由完整的車載系統平臺、人工智能平臺、數據模擬平臺和車隊管理平臺組成。所有無人駕駛出租車的數據將通過網絡傳輸回數據模擬平臺,人工智能平臺將用于算法的集成和優化。隨著車隊規模的擴大,將有一個車隊管理平臺進行統一管理。“這不僅僅是研發,它只是落地。”郎賢鵬在評價這個目標時說,“事實上,它仍然非常激進。”“軟硬一體化”是最快的方式。與許多提前制定2025年計劃的企業相比,主力軍剛剛到位的汽車和家居的研發面臨著在比其他企業更短的時間內制造出自我認證產品的巨大挑戰。在回答這個問題時,郎賢鵬選擇了“軟硬結合”,在他看來,這是最快的方式。在這個行業中,自動駕駛原型從來都不缺。郎賢鵬告訴車云,快速制造原型車很容易。科技公司通常采用的做法是通過電線購買一輛改裝過的汽車,先做軟件算法,然后將其移植到正式的汽車上。然而,基于不同車輛定制的算法并不是通用的,當它被移植到另一種完全不同的車輛上時,研究人員很容易在硬件適應階段拖延大量時間。郎賢鵬給我們舉了一個簡單的例子:一輛百公里加速3秒的汽車在設計自動駕駛決策規劃算法時,可以選擇在某個場景中超車,但當性能較差的汽車處于同一位置時,它只能跟車。汽車的性能不同,軟件算法也會相應調整。在郎賢鵬看來,找一輛Demo車先做軟件算法,然后移植,并不是一個特別好的研發理念。
Robo taxi的全系統架構汽車和該家族采用的“軟硬一體”自動駕駛儀研發理念是,有必要從一開始就明確這款汽車是什么樣的自動駕駛儀,整個汽車從設計開始就在為最終目標服務,底盤、執行器和電源的冗余設計,以及室內空間的設計。傳感器的位置、類型、計算平臺的選擇和算法都是與車輛硬件并行開發的,不存在時序關系。盡管時間緊迫,任務繁重,但汽車和家人還是選擇從零開始,開發一款自動駕駛汽車。當然,為了搶占2025年的時間節點,汽車和家居在效率最大化方面也考慮了一些豐富的方案。據郎賢鵬介紹,該網站……
ny即將推出的首款SUV將配備自動駕駛L2.5系統,該系統在功能上與特斯拉的自動駕駛系統相似。易航智能科技有限公司有限公司由車合佳投資,主要負責研發。在Robo出租車的發展過程中,這款車將承擔非常重要的駕駛行為數據收集。在這款車上市之前,郎賢鵬團隊將完成數據平臺的建設,以確保明年新車上市時數據能夠準確傳回,OTA功能將首先在這款車上使用。同時,該團隊將在第一款SUV框架的基礎上,對第一批自動駕駛汽車進行改革。這些Demo汽車的主要功能是通信數據服務、存儲、分發和生產等技術,并完成算法一些常見部分的準備工作。在2019年上半年推出用于網絡汽車的Robo打車后,上述常見的基礎能力將移植到定制的Robo出租車上,并在官方汽車上進行后續的算法開發。接下來的工作也有了具體的時間表:在2019年左右Robo出租車原型完成后,車和家將在2020年完成車輛的整體設計,在1-2年內改進算法,并在2023-2025年開始量產。雖然時間很短,但郎賢鵬認為,“只要軟硬件的節奏能跟上,還是很有希望的”。類人決策自動駕駛有一個龐大的產業鏈,每個角色都扮演著自己的角色。在時間和人力有限的情況下,汽車和家庭自己選擇的核心能力是規劃決策算法。L2和L3自動駕駛儀主要是感知和執行技術。對于L4級自動駕駛來說,這兩項技術已經接近成熟。決策規劃問題仍未解決。與L2和L3自動駕駛可以由人類干預相比,L4自動駕駛完全由系統控制,這也對決策和規劃能力提出了更高的要求。這是一個簡短的背景介紹。目前,規劃決策算法需要大量的駕駛行為數據進行訓練,有兩個研究方向,一個是完全基于規則的,另一個是基于學習的。前者用數學公式設計車輛在特定場景下的決策,哪些情況下可以超車,哪些結果選擇跟車。基于規則的優勢在于確定性,但世界是復雜多變的,因此很難窮盡所有場景并構建公式來描述它們。基于深度學習的方法是指通過向系統“饋送”足夠的數據,對系統的正確或錯誤做法建立獎懲機制,并增加判斷。隨著時間的推移,該算法可以在不同的情況下給出最優解。這種方法的缺點是,系統通過學習在某個參數下獲得了良好的性能,但當出現安全問題時,無法解釋原因,也無法解決問題。由于駕駛環境的復雜性,僅使用上述方法之一很難兼顧所有駕駛場景并確保安全。
在談到車和佳的算法研發思路時,郎賢鵬建議車和佳在未來的決策規劃和開發中,將采用類人思維進行決策研發,讓自動駕駛像人一樣思考,既能保證安全優先,容忍不確定性,又能不斷進化,考慮長期和短期目標,并及時做出判斷。其中,在確保安全優先的情況下,汽車和家庭的理念是為安全相關部分制定規則,例如汽車不能開到路邊,不能左轉進入逆行車道。。。工程師們用數學公式來表達這些與安全相關的部分,并制定一些強制性規則。通過基于深度學習的方法實現了與安全無關的駕駛舒適性內容。這種方法可以確保安全相關部件更加可控和直觀,舒適相關部件更加靈活。同時,在一些決策算法的設計上,郎賢鵬希望能有更多深思熟慮的考慮。工程師將考慮長期和短期目標來做出決策。舉個例子,在高速公路上跟車時,是否向左變道……
向右r取決于車輛是否應該從附近的匝道離開高速公路。當你掌握了更多的全球信息,你就會做出更明智的決定。郎賢鵬告訴我們,在總體規劃中,對于核心決策規劃部分,車和嘉的總體規劃是降低深度學習算法的比例,并在研發過程中,嘗試對一些現在無法描述的事情逐漸形成規則。這一切的出發點是因為自動駕駛汽車是一種基于安全的產品。數據,數據,數據在談到生命數據時,郎賢鵬提到了自己對自動駕駛產品化的思考。無論是汽車和家庭使用首款SUV所做的數據準備,還是決策規劃算法的訓練需求,大量真實的人類駕駛數據都是自動駕駛產品落地的關鍵,也是每個企業都想牢牢掌握在手中的寶貴資源。郎賢鵬在強調數據的重要性時指出,“沒有數據,所有計劃都是紙上談兵”。
汽車和家庭的完整數據流。他對數據重要性的理解來自于之前的研究和開發經驗。郎賢鵬曾使用開源算法的改進代碼框架,在訓練數據較少的情況下,識別率僅為80%-85%。然而,在海量數據的訓練下,97%的識別率為-99%,在某些研究領域的性能與創新算法相當甚至超過。科學研究和產品也有相似之處。在科學研究領域,如果你有十公里的數據,你可以寫一篇學術論文。如果你有一百公里的數據,它已經是一個非常豐富的紙質材料了。很少看到基于數千公里數據的科學研究論文。郎賢鵬說:“科學研究所需的數據量與制造自動駕駛產品所需的數量完全不同。”。這也讓他明白了數據在產品化過程中的重要性。科技公司很難找到不同的人在真實場景中做大量的駕駛測試,并為自己積累數據。盡管雇傭測試人員有機會積累大量數據,但也很難避免數據的同質化——不同的人會有不同的駕駛習慣和方法,更不用說地理覆蓋的問題了。汽車公司擁有最多的數據資源,他們也可以考慮回收數據的多樣性。而且,汽車和家庭將有一整套數據采集、收集和生產的流程,以確保數據能夠在自動駕駛算法的訓練中更好地發揮作用。第一輛SUV上市后,后臺將開始獲取車輛返回的駕駛數據和環境數據。據郎顯鵬估計,到2021,預計將有數百億公里的數據返回,足以支持自主駕駛算法的研發。總結在演講的最后,郎賢鵬表示,車和嘉的自動駕駛團隊的工作才剛剛開始,在接下來的7-8年里,我希望能非常認真地完成這件事。在某種程度上,汽車和家用自動駕駛項目的順利進行很大程度上取決于首款SUV的市場表現。根據計劃,車和家的首款SUV將是一款續航里程700公里以上的增程電動汽車,將于今年下半年發布,并于2019年正式上市。隨著新車的推出和數據的回歸,希望汽車和家用自動駕駛的研發將迎來更快的發展階段。
繼6月15日鈴木汽車正式退出昌河鈴木之后,其在華的第二家合資企業長安鈴木立即成為受關注的焦點。
1900/1/1 0:00:00世界杯激戰正酣,球場上的每一秒都顯得異常緊張。同樣在新能源汽車領域,一場無聲的較量也在進行中,誰能在新能源汽車市場的競爭中沖出重圍?誰又能留到最后?成為各方關注的焦點。
1900/1/1 0:00:00最近,特斯拉的新聞有點多。但拋開諸多有關在華建廠和產能的消息,最近特斯拉在環保這一本來是自身優勢的議題上屢屢“受傷”。
1900/1/1 0:00:00據國外媒體CNBC報道,盡管鮮少取得季度盈利,特斯拉自8年前IPO以來股價上漲將近2000,市值超過福特、通用汽車等傳統汽車巨頭。要延續最近的股價上升勢頭,它將需要掃清三大障礙。
1900/1/1 0:00:00據外媒報道,印度SRM科技研究院(SRMInstituteofScienceandTechnology)旗下的自動駕駛系統實驗室發布了一份新人工智能報告,該報告指出,或許在未來的某一天,
1900/1/1 0:00:00在特斯拉的示范效應下,全世界掀起了電動車浪潮,但是車用鋰電池卻成了供應不足的短板。全世界的鋰電池制造商,正在大舉擴大產能,滿足市場所需。
1900/1/1 0:00:00