自動駕駛的未來在哪里?這是一個極其廣泛的問題。按照技術演進的規劃,自動駕駛從L0到L5分為六層,每一層都有不同的實現時間預期和技術演進路線。其中L3-L5被認為是真正的自動駕駛能力,L1-L2只能算是自動駕駛輔助。從落地來看,市面上相當一部分L2級別的自動駕駛輔助設備已經量產交付。L3自動駕駛有望在未來1-3年內逐步實現量產交付;L4和L5多為Demo,談量產為時尚早。L2到L3最大的飛躍在于地圖數據的融合,而不僅僅是計算機視覺、系統決策能力、硬件計算能力等感知水平的提升。如何將地圖數據與ADAS完美融合,也是一個極其寬泛的問題,幾乎可以決定自動駕駛行業的未來。與我們日常所知道的導航地圖(SD地圖)不同,自動駕駛所需要的地圖根本不是可視化的產物,而是各種圖層和數據的堆砌。在具體的定義和命名上,每個自動駕駛公司和地圖供應商都有不同的思路,但最終落地時基本不會離開高精地圖的范疇。那么,什么是高精地圖呢?首先,定義高精度。一般來說,地圖數據的絕對精度小于1m,相對精度在10-20cm之間,以滿足L3自動駕駛儀的應用。如果是L4甚至L5自動駕駛功能,就需要更精確的地圖數據,比如厘米級。高精度的基礎地圖數據只是構建HD-Map的基礎,展館需要更多的道路和環境元素,以及多維度的圖層來構建。道路包括但不限于車道方向、道路中心、車道連接線、停車線、應急線、斷面關系、虛擬連接線、高速公路邊界、限速信息、象征意義、坡度、曲率;另一方面,道路周圍的環境信息也很重要。簡單的理解就是在哪里,有什么樣的地標,是樹還是龍門架,你要給我標出來。

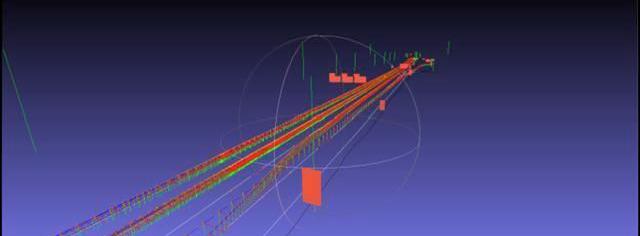
車道線互聯靜態數據夠用嗎?不完全是。從高精地圖的構建和采集來看,除了靜態維度,來自數據采集車的大量駕駛體驗數據和實時環境動態數據可以進一步豐富高精地圖的信息維度。因為一個好的自動駕駛算法應該具備和優秀的人類駕駛員一樣的性能,而這需要人工智能算法和地圖經驗數據的共同加持。這些多維數據疊加在一起,形成一個服務于自動駕駛算法的三維虛擬世界。換句話說,普通導航地圖是給人看的,高精地圖是給機器看的。虛擬世界的建立我相信大部分人都遇到過車頂有一堆傳感器的地圖測繪車。比如百度和高德的測繪車就是我見過最常見的。提高傳感器精度(包括視覺相機和激光雷達)后,可以服務于高精度地圖的采集,這也是傳統地圖廠商的慣用方法。專用地圖采集車的優點是數據維度豐富,位置信息等重要數據的精度高。缺點?缺點是更新慢,成本高。與傳統地圖廠商明顯不同的是,以自動駕駛開發者身份進入地圖行業的公司。他們的制圖方法大多依賴于眾包,他們通過基本的視覺圖像和分布在邊緣和云中的一套算法來合成可用的高精度地圖。這些圖像是從哪里來的?它可以從ADAS系統或一套額外的小硬件中截取。缺點是什么?車端的定位硬件性能差異很大,在位置信息中嵌入視覺圖像時,極有可能產生幾米甚至幾十米的偏差。這種情況下如何提高數據的可用性才是核心競爭力。對于成熟的自動駕駛開發者來說,一個明顯的優勢是安裝在量產車型上的視覺傳感器的基數。以Mobileye為例,他們有可用于地圖數據采集的量產ADAS,具有足夠的規模效應,可以克服單一數據采集中數據分散的問題。如果很難理解,回想一下你高中數學課上的正態分布,差不多就是這樣。
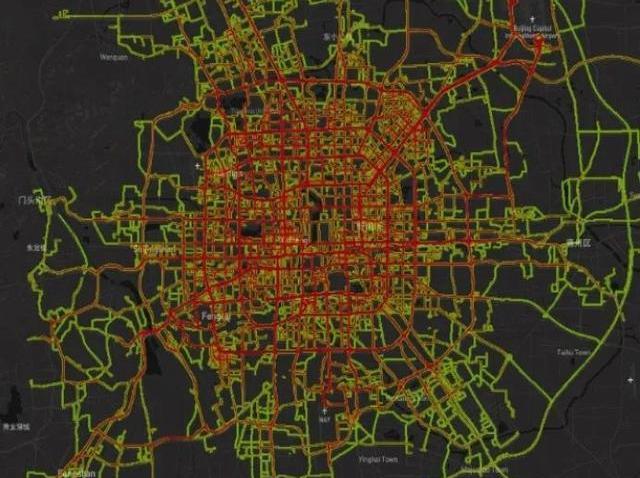
眾包(無離散采集)采集的信息在傳感器基數/裝載數上足夠大,算法足夠優秀,可視化眾包地圖采集方案也能產生一張優秀的高精度地圖,一個行業的基礎數據是一條車道需要10次采集才能采集到測繪數據。加載量還涉及到一個很關鍵的屬性:地圖更新的速度。那么多車每天在路上采集地圖數據,更新速度的瓶頸不再是數據采集,而是后端的數據處理。處理速度多快,地圖更新周期就短。當越來越多的車輛標配L2自動駕駛輔助時,車輛端眾包地圖的硬件成本變得微不足道,因為ADAS相關的感知、計算硬件和車聯網能力可以重復使用。主要難點和成本在于車端的高效邊緣算法和云端生產線的搭建。好的邊緣算法可以保證數據上傳的成本可控。在新的汽車現代化時代,云能力的建設是任何一個雄心勃勃的汽車行業巨頭都必須要做的事情。放棄就意味著被淘汰。因此,可視化眾包制圖從采集過程來看,顯然是低成本和極高的更新效率。
眾包密度數據和感知的前端融合對于目前的汽車行業體系,筆者有一個激進的看法。更高級別的自動駕駛輔助功能,比如L3,應該和地圖能力屬于同一個開發體系,形成數據閉環和互通。為什么?從第一次應用地圖數據開始,取L3函數a……一個例子,在自動駕駛系統運行過程中,將海量地圖數據與實時感知結果作為基礎數據進行對比,實現高精度視覺定位,在此能力背景下,可以實現安全自主變道、高速變換等功能。實時數據制圖與現有高精度地圖的融合過程是SLAM。如果細說的話,會是一篇很長的文章,這里就不贅述了。因此,如果地圖數據的視覺采集過程和自動駕駛視覺感知在算法上相似,那么就可以在前端實現高效的數據融合,提高視覺定位精度。但為什么是激進的觀點呢?因為對于目前的汽車工業體系來說,各部分找供應商解決問題是慣例,地圖數據和自動駕駛能力很容易來自不同的供應商,它們之間的結構化數據的銜接很容易成為瓶頸。其實業內已經有現成的案例把地圖數據采集和自動駕駛能力框在同一個開發體系下,比如Mobileye,特斯拉,甚至李,交付量剛剛過萬。除了前端融合產生的高精度定位結果,高精度地圖所包含的豐富信息還可以進一步優化自動駕駛輔助的性能。比如跨線橋連接處的異常坡度數據,可以幫助自動駕駛系統實現預防性減速,避免車輛顛簸帶來的不適;或者參考駕駛經驗數據,在接近小曲率的高速/高架路段時,以更平穩的速度通過。這些基于數據能力的細節場景優化,帶來的是整體駕駛體驗和安全性的提升。一個參考邏輯是,一個人類老司機最重要的技能是對路面和道路環境的熟悉。一套配備實時更新、數據豐富的高精地圖的自動駕駛算法,顯然與“老司機”有著相同的能力邏輯。閉環在這里,地圖生產和使用的閉環已經形成:眾包地圖數據采集>;高精地圖對自動駕駛輔助的加持>:更好的用戶體驗>更多的銷量>更多眾包地圖數據的閉環蘊含著豐富的用戶運營維度和變現能力。當然,如何調動用戶的積極性,實現地圖數據的進一步變現也是一個寬泛的問題,這里就不討論了,留給行業內的先行者去尋找最好的答案。自動駕駛的未來在哪里?這是一個極其廣泛的問題。按照技術演進的規劃,自動駕駛從L0到L5分為六層,每一層都有不同的實現時間預期和技術演進路線。其中L3-L5被認為是真正的自動駕駛能力,L1-L2只能算是自動駕駛輔助。從落地來看,市面上相當一部分L2級別的自動駕駛輔助設備已經量產交付。L3自動駕駛有望在未來1-3年內逐步實現量產交付;L4和L5多為Demo,談量產為時尚早。L2到L3最大的飛躍在于地圖數據的融合,而不僅僅是計算機視覺、系統決策能力、硬件計算能力等感知水平的提升。如何將地圖數據與ADAS完美融合,也是一個極其寬泛的問題,幾乎可以決定自動駕駛行業的未來。與我們日常所知道的導航地圖(SD地圖)不同,自動駕駛所需要的地圖根本不是可視化的產物,而是各種圖層和數據的堆砌。在具體的定義和命名上,每個自動駕駛公司和地圖供應商都有不同的思路,但最終落地時基本不會離開高精地圖的范疇。那么,什么是高精地圖呢?首先,定義高精度。一般來說,地圖數據的絕對精度小于1m,相對精度在10-20cm之間,以滿足L3自動駕駛儀的應用。如果是L4甚至L5自動駕駛功能,就需要更精確的地圖數據,比如厘米級。高精度的基礎地圖數據只是構建HD-Map的基礎,展館需要更多的道路和環境元素,以及多維度的圖層來構建。道路包括但不限于車道方向、道路中心、車道連接線、停車線、應急線、斷面關系、虛擬連接線、高速公路邊界、限速信息、象征意義、坡度、曲率;另一方面,道路周圍的環境信息也很重要。簡單的理解就是在哪里,有什么樣的地標,是樹還是龍門架,你要給我標出來。
車道線互聯靜態數據夠用嗎?不完全是。從高精地圖的構建和采集來看,除了靜態維度,來自數據采集車的大量駕駛體驗數據和實時環境動態數據可以進一步豐富高精地圖的信息維度。因為一個好的自動駕駛算法應該具備和優秀的人類駕駛員一樣的性能,而這需要人工智能算法和地圖經驗數據的共同加持。這些多維數據疊加在一起,形成一個服務于自動駕駛算法的三維虛擬世界。換句話說,普通導航地圖是給人看的,高精地圖是給機器看的。虛擬世界的建立我相信大部分人都遇到過車頂有一堆傳感器的地圖測繪車。比如百度和高德的測繪車就是我見過最常見的。提高傳感器精度(包括視覺相機和激光雷達)后,可以服務于高精度地圖的采集,這也是傳統地圖廠商的慣用方法。專用地圖采集車的優點是數據維度豐富,位置信息等重要數據的精度高。缺點?缺點是更新慢,成本高。與傳統地圖廠商明顯不同的是,以自動駕駛開發者身份進入地圖行業的公司。他們的制圖方法大多依賴于眾包,他們通過基本的視覺圖像和分布在邊緣和云中的一套算法來合成可用的高精度地圖。這些圖像是從哪里來的?它可以從ADAS系統或一套額外的小硬件中截取。缺點是什么?車端的定位硬件性能差異很大,在位置信息中嵌入視覺圖像時,極有可能產生幾米甚至幾十米的偏差。這種情況下如何提高數據的可用性才是核心競爭力。對于成熟的自動駕駛開發者來說,一個明顯的優勢是安裝在量產車型上的視覺傳感器的基數。以Mobileye為例,他們有可用于地圖數據采集的量產ADAS,具有足夠的規模效應,可以克服單一數據采集中數據分散的問題。如果很難理解,回想一下你高中數學課上的正態分布,差不多就是這樣。
眾包(無離散采集)采集的信息在傳感器基數/裝載數上足夠大,算法足夠優秀,可視化眾包地圖采集方案也能產生一張優秀的高精度地圖,一個行業的基礎數據是一條車道需要10次采集才能采集到測繪數據。加載量還涉及到一個很關鍵的屬性:地圖更新的速度。那么多車每天在路上采集地圖數據,更新速度的瓶頸不再是數據采集,而是后端的數據處理。處理速度多快,地圖更新周期就短。當越來越多的車輛標配L2自動駕駛輔助時,車輛端眾包地圖的硬件成本變得微不足道,因為ADAS相關的感知、計算硬件和車聯網能力可以重復使用。主要難點和成本在于車端的高效邊緣算法和云端生產線的搭建。好的邊緣算法可以保證數據上傳的成本可控。在新的汽車現代化時代,云能力的建設是任何一個雄心勃勃的汽車行業巨頭都必須要做的事情。放棄就意味著被淘汰。因此,可視化眾包制圖從采集過程來看,顯然是低成本和極高的更新效率。
眾包密度數據和感知的前端融合對于目前的汽車行業體系,筆者有一個激進的看法。更高級別的自動駕駛輔助功能,比如L3,應該和地圖能力屬于同一個開發體系,形成數據閉環和互通。為什么?從第一次應用地圖數據開始,取L3函數a……一個例子,在自動駕駛系統運行過程中,將海量地圖數據與實時感知結果作為基礎數據進行對比,實現高精度視覺定位,在此能力背景下,可以實現安全自主變道、高速變換等功能。實時數據制圖與現有高精度地圖的融合過程是SLAM。如果細說的話,會是一篇很長的文章,這里就不贅述了。因此,如果地圖數據的視覺采集過程和自動駕駛視覺感知在算法上相似,那么就可以在前端實現高效的數據融合,提高視覺定位精度。但為什么是激進的觀點呢?因為對于目前的汽車工業體系來說,各部分找供應商解決問題是慣例,地圖數據和自動駕駛能力很容易來自不同的供應商,它們之間的結構化數據的銜接很容易成為瓶頸。其實業內已經有現成的案例把地圖數據采集和自動駕駛能力框在同一個開發體系下,比如Mobileye,特斯拉,甚至李,交付量剛剛過萬。除了前端融合產生的高精度定位結果,高精度地圖所包含的豐富信息還可以進一步優化自動駕駛輔助的性能。比如跨線橋連接處的異常坡度數據,可以幫助自動駕駛系統實現預防性減速,避免車輛顛簸帶來的不適;或者參考駕駛經驗數據,在接近小曲率的高速/高架路段時,以更平穩的速度通過。這些基于數據能力的細節場景優化,帶來的是整體駕駛體驗和安全性的提升。一個參考邏輯是,一個人類老司機最重要的技能是對路面和道路環境的熟悉。一套配備實時更新、數據豐富的高精地圖的自動駕駛算法,顯然與“老司機”有著相同的能力邏輯。閉環在這里,地圖生產和使用的閉環已經形成:眾包地圖數據采集>;高精地圖對自動駕駛輔助的加持>:更好的用戶體驗>更多的銷量>更多眾包地圖數據的閉環蘊含著豐富的用戶運營維度和變現能力。當然,如何調動用戶的積極性,實現地圖數據的進一步變現也是一個寬泛的問題,這里就不討論了,留給行業內的先行者去尋找最好的答案。
8月31日,蔚來NIOUS在官方微博上宣布,20kW家用快充樁正式開售,全新安裝價為168萬元。蔚來車主可在蔚來APP車商城內選購。
1900/1/1 0:00:00德國NTV電視臺試駕OBRISTMarkII原型車,聽OBRIST兩位創始人講述他們的心聲。
1900/1/1 0:00:008月27日,小鵬汽車成功掛牌紐交所,以最高172億美元、最低15億美元的募資額,創造了“全球新能源汽車史上最高IPO記錄”。至此,中國造車新勢力前三強:蔚來、理想、小鵬,成功會師美國資本市場。
1900/1/1 0:00:00同比下降21784江淮汽車上半年凈利潤147億8月28日,江淮汽車(600418SH)發布2020年上半年業績報告,今年上半年江淮汽車實現營收24941億元,同比下降7
1900/1/1 0:00:00本周,新造車企業中最重要的事件是小鵬汽車在紐交所掛牌上市。作為國內第三家在美IPO的新造車企業,小鵬汽車的上市意味著“有理想、有鵬友、有蔚來”的造車新勢力三足鼎立的局面正式形成。
1900/1/1 0:00:00財聯社北京記者劉陽、徐昊訊8月28日,ST海馬(000572SZ)發布2020年半年報,公司2020年16月實現營業收入1350億元,同比下降43
1900/1/1 0:00:00