近日,全球計算機視覺和人工智能領域頂尖科學家、奇點汽車美國公司總裁黃宇博士在上海大學發表了題為“自動駕駛的深度學習”的精彩演講。黃博士表示:“自動駕駛是一個具有挑戰性的自動智能應用領域,實現汽車的自動駕駛需要許多研究。”黃宇博士曾是百度美國研發中心的自動駕駛高級軟件架構師,也曾在英特爾總部等多家著名跨國科技公司工作,三星電子美國研發中心、華為、湯姆森等。他在人工智能領域有著豐富的經驗和獨特的見解。黃宇博士曾說過:“汽車時代的未來是智能汽車”。在本次講座中,黃宇博士就自動駕駛的技術算法、市場前景和價值以及未來規劃進行了深入探討。

在硅谷工作多年的黃宇博士切身感受到,自動駕駛作為變革的核心驅動力,近年來正在加速汽車行業的智能化。他表示,隨著人工智能和深度學習技術的成熟,衍生出的自動駕駛技術不僅是當前全球汽車和智能出行的發展方向,也是各大車企爭相爭奪的戰略制高點。自動駕駛作為汽車行業未來轉型升級的重要方向,因其巨大的市場空間,成為汽車行業下新的“藍海”。中國的汽車市場一直對新技術持開放態度。自2016年以來,人工智能、物聯網、高性能計算等一系列新信息技術的輸出為自動駕駛的發展做出了貢獻。有人猜測,自動駕駛在中國市場的發展前景可能是黃宇博士加入奇點汽車的主要原因之一。在這里,他將把所學付諸實踐,實現業務落地。黃宇博士的演講干貨滿滿,從理論框架到應用,為學生和與會者帶來了一場科技盛宴。他專注于自動駕駛的概念和分類,以及深度學習在自動駕駛實現中的應用。視覺部分包括障礙物的檢測和識別、交通標志和紅綠燈的檢測和辨識、車道線和標線的識別等。詳細闡述了傳感器的功能和功能,包括校準和融合,以及場景分割、目標跟蹤、駕駛員行為模型、端到端學習,自動駕駛主要分為感知、規劃和控制三個模塊。在感知層面,利用激光雷達、毫米波雷達和超聲波雷達等各種傳感器、高精度地圖和V2V車聯網技術,實現對車輛周圍環境的感知和識別,以及對車輛本身的準確定位。在規劃層面,通過感知層收集的信息,規劃下一步行動,選擇合理的路徑、行為和動作;
在控制層面,決策控制信息與車底控制系統深度融合,通過線控技術完成執行器的電控,實現真正的自動駕駛。此外,還有一種難度更大的端到端深度學習方案,可以通過接受傳感器來簡化系統流程,直接降低計算要求,從而實現自動駕駛。
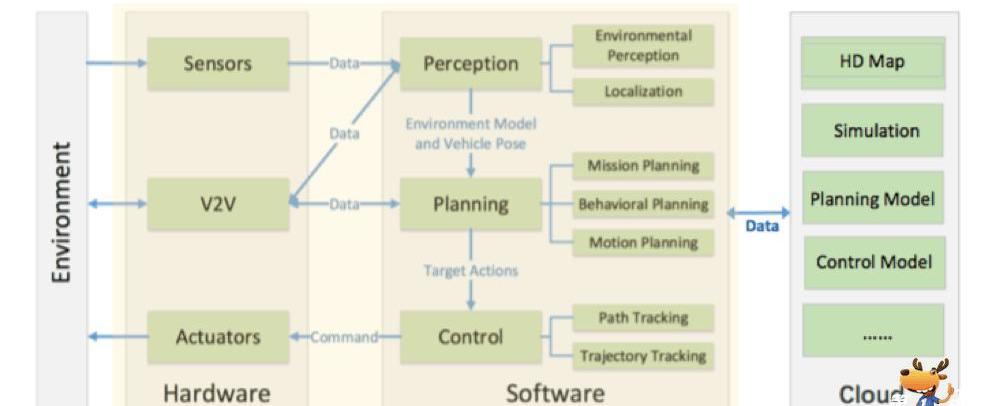
自動駕駛的研究路徑和研究方向黃宇博士根據PPT的內容詳細闡述了自動駕駛的框架。“正如你所看到的,硬件部分主要是傳感器,有時可以添加一些V2V。汽車的定位是通過通信和執行器實現的,可以作為獨立的控制。軟件部分,車身有自己的軟件部分,這就是我剛才提到的感知、規劃和控制。感知是對周圍環境的認知,包括ng靜態和動態。它分為兩部分,一部分是定位,也就是說你需要知道你的車在哪里。定位技術也有很多,大部分是基于地圖,還有一些是基于路標等各種信息。感知的另一部分是障礙物檢測,即識別動態和靜態物體。"
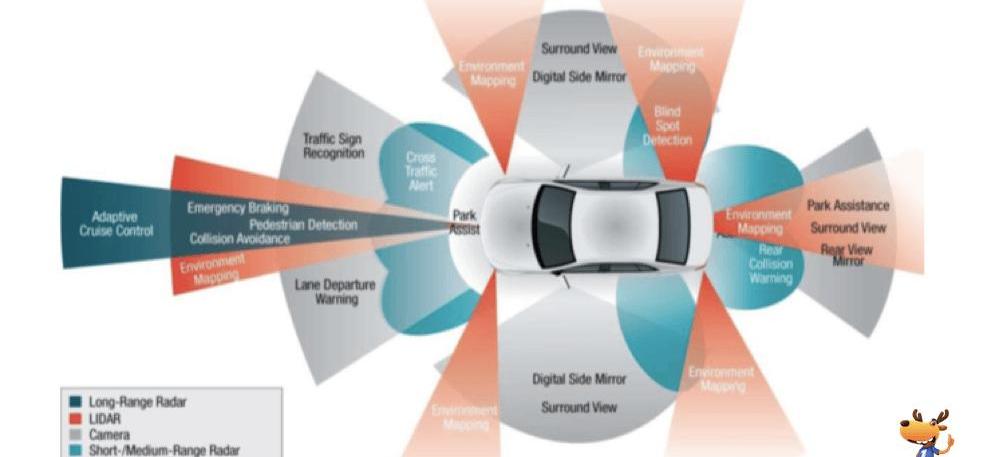
典型的自動駕駛傳感器布置方案黃宇博士也提到,“如今有兩種主流的自動駕駛路線。像特斯拉這樣的第一類汽車制造商通常從L2開始涉足自動駕駛領域,大多數車企在L2和L3之間推出L2或自動駕駛汽車。第二類是谷歌、百度等互聯網公司直接從L4起步,進入自動駕駛的高端分區。這實際上意味著我不需要考慮司機的問題。我考慮的是如何讓機器學會駕駛。”談到計算視覺在這項技術中的主流應用,黃博士說:“計算視覺是從二維世界到三維世界的逆過程,它實際上是一個病理問題。這個問題在20世紀70年代的計算視覺領域被暴露出來。每個人都在試圖解決這個逆過程,這與圖形正好相反。圖形通過三維模型生成二維圖形,所以只要計算量足夠,并且可以計算,圖形就沒有問題。但計算機視覺意味著它不僅是一個計算問題,而且是一個逆過程,有時解是不穩定的。讓我給你舉個例子。2000年左右,微軟利用PrimeSense技術(后來被蘋果收購)推出了一款名為Kinect的產品。當時,它被稱為RGB-D傳感器。事實上,它是2.5維的,2.5維的傳感器數據大大降低了計算機視覺的難度。不幸的是,一般的2.5維傳感器通常不遠。Kinect基本上最多只能在五到六米的范圍內工作,即使經過增強,也可以在十米外工作。然而,對于汽車來說,這是絕對不可能的。汽車不可能用這個東西來探測周圍的環境。目前,使用RGB-D傳感器的汽車公司可能只是把它放在汽車前面較低的位置,并用它來監測一些障礙物,如車道線或非常近的障礙物。顯然,這種東西只能在低速下使用。”“所以谷歌,包括百度,使用激光雷達,通過發射激光,然后接收回波來重建三維空間。在每個點上,它都有三維坐標,甚至有反射值。反射值可能因材質而異,有時此反射值也會發揮作用。因此,谷歌的方法是使用激光雷達作為主要的障礙物檢測。那么相機是干什么用的呢?攝像頭主要用來做激光雷達做不到的事情。例如,你可以做紅綠燈檢測,你可以進行交通標志檢測,然后你可以做一些警察手勢分析。例如,如果前方的道路被封鎖,或者如果你想轉彎,也就是說,道路已經封閉,他會在那里幫助你進行一些指導,他們會使用攝像頭來完成。”。黃宇給出了以上關于激光雷達和攝像頭的解釋。據悉,奇點iS6是奇點汽車的第一代量產車型,上市時可以實現L2級的高級輔助駕駛能力,包括mo……
全速自適應巡航、車道保持、緊急制動、自動泊車和盲點檢測等十多項功能。奇點的目標是在2018年將自動駕駛算法升級到L3(SAE標準)。場景包括高速公路的自動駕駛和有限的城市道路。加入奇點汽車的黃宇博士將以硅谷為基地,全面落實奇點汽車智能化和自動駕駛的發展核心,帶領奇點汽車的自動駕駛研發團隊不斷登峰造極,為奇點汽車的智能技術注入新的驅動力。目前,奇點汽車在自動駕駛中采用深度學習算法,需要覆蓋感知、決策等關鍵環節,算法的質量需要用更高質量的數據來填充,這就是為什么數據被企業視為自動駕駛的短板。除了開發汽車自身技術,奇點汽車還成立了奇點汽車智能系統研發中心、奇點汽車研究院、奇點汽車智能新能源汽車產業園和奇點汽車智能化新能源汽車工業園,所有這些都為自動駕駛數據的落地背書。此外,奇點汽車還利用自動駕駛計算平臺NVIDIA DRIVE PX2,不斷加強自動駕駛的研發。目前,它可以在有限的城市區域內實現高速公路和道路的自動駕駛。

作為國內領先的新勢力,奇點汽車深知,汽車行業未來的發展趨勢離不開智能化和自動駕駛技術。奇點汽車希望通過吸收高科技人才,整合優質技術資源,為用戶帶來全方位的智能新體驗。近日,全球計算機視覺和人工智能領域頂尖科學家、奇點汽車美國公司總裁黃宇博士在上海大學發表了題為“自動駕駛的深度學習”的精彩演講。黃博士表示:“自動駕駛是一個具有挑戰性的自動智能應用領域,實現汽車的自動駕駛需要許多研究。”黃宇博士曾是百度美國研發中心的自動駕駛高級軟件架構師,也曾在英特爾總部等多家著名跨國科技公司工作,三星電子美國研發中心、華為、湯姆森等。他在人工智能領域有著豐富的經驗和獨特的見解。黃宇博士曾說過:“汽車時代的未來是智能汽車”。在本次講座中,黃宇博士就自動駕駛的技術算法、市場前景和價值以及未來規劃進行了深入探討。
在硅谷工作多年的黃宇博士切身感受到,自動駕駛作為變革的核心驅動力,近年來正在加速汽車行業的智能化。他表示,隨著人工智能和深度學習技術的成熟,衍生出的自動駕駛技術不僅是當前全球汽車和智能出行的發展方向,也是各大車企爭相爭奪的戰略制高點。自動駕駛作為汽車行業未來轉型升級的重要方向,因其巨大的市場空間,成為汽車行業下新的“藍海”。中國的汽車市場一直對新技術持開放態度。自2016年以來,人工智能、物聯網、高性能計算等一系列新信息技術的輸出為自動駕駛的發展做出了貢獻。有人猜測,自動駕駛在中國市場的發展前景可能是黃宇博士加入奇點汽車的主要原因之一。在這里,他將把所學付諸實踐,實現業務落地。黃宇博士的演講干貨滿滿,從理論框架到應用,為學生和與會者帶來了一場科技盛宴。他專注于自動駕駛的概念和分類,以及深度學習在自動駕駛實現中的應用。視覺部分包括障礙物的檢測和識別、交通標志和紅綠燈的檢測和辨識、車道線和標線的識別等……
詳細闡述了傳感器的功能和功能,包括校準和融合,以及場景分割、目標跟蹤、駕駛員行為模型、端到端學習、駕駛監控等。自動駕駛主要分為感知、規劃和控制三個模塊。在感知層面,利用激光雷達、毫米波雷達和超聲波雷達等各種傳感器、高精度地圖和V2V車聯網技術,實現對車輛周圍環境的感知和識別,以及對車輛本身的準確定位。在規劃層面,通過感知層收集的信息,規劃下一步行動,選擇合理的路徑、行為和動作;
在控制層面,決策控制信息與車底控制系統深度融合,通過線控技術完成執行器的電控,實現真正的自動駕駛。此外,還有一種難度更大的端到端深度學習方案,可以通過接受傳感器來簡化系統流程,直接降低計算要求,從而實現自動駕駛。
自動駕駛的研究路徑和研究方向黃宇博士根據PPT的內容詳細闡述了自動駕駛的框架。“正如你所看到的,硬件部分主要是傳感器,有時可以添加一些V2V。汽車的定位是通過通信和執行器實現的,可以作為獨立的控制。軟件部分,車身有自己的軟件部分,這就是我剛才提到的感知、規劃和控制。感知是對周圍環境的認知,包括ng靜態和動態。它分為兩部分,一部分是定位,也就是說你需要知道你的車在哪里。定位技術也有很多,大部分是基于地圖,還有一些是基于路標等各種信息。感知的另一部分是障礙物檢測,即識別動態和靜態物體。"
典型的自動駕駛傳感器布置方案黃宇博士也提到,“如今有兩種主流的自動駕駛路線。像特斯拉這樣的第一類汽車制造商通常從L2開始涉足自動駕駛領域,大多數車企在L2和L3之間推出L2或自動駕駛汽車。第二類是谷歌、百度等互聯網公司直接從L4起步,進入自動駕駛的高端分區。這實際上意味著我不需要考慮司機的問題。我考慮的是如何讓機器學會駕駛。”談到計算視覺在這項技術中的主流應用,黃博士說:“計算視覺是從二維世界到三維世界的逆過程,它實際上是一個病理問題。這個問題在20世紀70年代的計算視覺領域被暴露出來。每個人都在試圖解決這個逆過程,這與圖形正好相反。圖形通過三維模型生成二維圖形,所以只要計算量足夠,并且可以計算,圖形就沒有問題。但計算機視覺意味著它不僅是一個計算問題,而且是一個逆過程,有時解是不穩定的。讓我給你舉個例子。2000年左右,微軟利用PrimeSense技術(后來被蘋果收購)推出了一款名為Kinect的產品。當時,它被稱為RGB-D傳感器。事實上,它是2.5維的,2.5維的傳感器數據大大降低了計算機視覺的難度。不幸的是,一般的2.5維傳感器通常不遠。Kinect基本上最多只能在五到六米的范圍內工作,即使經過增強,也可以在十米外工作。然而,對于汽車來說,這是絕對不可能的。汽車不可能用這個東西來探測周圍的環境。目前,使用RGB-D傳感器的汽車公司可能只是把它放在汽車前面較低的位置,并用它來監測一些障礙物,如車道線或非常近的障礙物。顯然,這種東西只能在低速下使用。”“所以谷歌,包括百度,使用激光雷達,通過發射激光,然后接收回波來重建三維空間。在每個點上,它都有三維坐標,甚至有反射值。反射值可能因材質而異,有時此反射值也會發揮作用。因此,谷歌的方法是使用激光雷達作為主要的障礙物檢測。那么相機是干什么用的呢?攝像頭主要用來做激光雷達做不到的事情。例如,你可以做紅綠燈檢測,你可以進行交通標志檢測,然后你可以做一些警察手勢分析。例如,如果前方的道路被封鎖,或者如果你想轉彎,也就是說,道路已經封閉,他會在那里幫助你進行一些指導,他們會使用攝像頭來完成。”。黃宇給出了以上關于激光雷達和攝像頭的解釋。據悉,奇點iS6是奇點汽車的第一代量產車型,上市時可以實現L2級的高級輔助駕駛能力,包括mo……
全速自適應巡航、車道保持、緊急制動、自動泊車和盲點檢測等十多項功能。奇點的目標是在2018年將自動駕駛算法升級到L3(SAE標準)。場景包括高速公路的自動駕駛和有限的城市道路。加入奇點汽車的黃宇博士將以硅谷為基地,全面落實奇點汽車智能化和自動駕駛的發展核心,帶領奇點汽車的自動駕駛研發團隊不斷登峰造極,為奇點汽車的智能技術注入新的驅動力。目前,奇點汽車在自動駕駛中采用深度學習算法,需要覆蓋感知、決策等關鍵環節,算法的質量需要用更高質量的數據來填充,這就是為什么數據被企業視為自動駕駛的短板。除了開發汽車自身技術,奇點汽車還成立了奇點汽車智能系統研發中心、奇點汽車研究院、奇點汽車智能新能源汽車產業園和奇點汽車智能化新能源汽車工業園,所有這些都為自動駕駛數據的落地背書。此外,奇點汽車還利用自動駕駛計算平臺NVIDIA DRIVE PX2,不斷加強自動駕駛的研發。目前,它可以在有限的城市區域內實現高速公路和道路的自動駕駛。
作為國內領先的新勢力,奇點汽車深知,汽車行業未來的發展趨勢離不開智能化和自動駕駛技術。奇點汽車希望通過吸收高科技人才,整合優質技術資源,為用戶帶來全方位的智能新體驗。
標簽:特斯拉
據CNNMoney報道,美國總統可能抱怨稱,“美國造”汽車被日本汽車市場拒之門外。但是,專家指出,事實并非如此日本汽車市場,并沒有那么封閉,而是已經“客滿為患”。
1900/1/1 0:00:003月27日消息,繼上周Uber公司的自動駕駛汽車發生嚴重車禍、致一名49歲的女行人喪生后,26日,亞利桑那州州長叫停了Uber在公共道路上的自動駕駛汽車測試。
1900/1/1 0:00:00日前,科技部正式發布了《2017年中國獨角獸企業發展報告》,涉及互聯網金融、交通出行、智能硬件等諸多領域,共計164家企業榮登榜單。
1900/1/1 0:00:003月27日消息,特斯拉聯合多家大學推出了一個新的汽車培訓項目,該項目名字叫“TeslaSTART”,旨在培養下一代電動汽車技術人員。
1900/1/1 0:00:00自動駕駛汽車已經慢慢從實驗室里走出來,走入了我們的日常生活中。Uber,Waymo,Tesla和Toyota等公司都在緊鑼密鼓地進行自己的相關測試。
1900/1/1 0:00:00在戴姆勒股份公司(PINKDDAIF)董事會主席、梅賽德斯奔馳汽車集團全球總裁蔡澈(DieterZetsche)看來,中國已成為全球汽車行業轉型過程中的重要驅動力。
1900/1/1 0:00:00