許多公司已經開始提供自己的汽車,可以在公園、校園、景點和固定公交線路等有限的環境中載客。在他們的產品宣傳中,我們經常可以看到“無人駕駛”這個高頻詞,不小心收到十幾個“未來來了”的興奮和喜悅!
嘿,等一下,只要方向盤后面沒有司機,我們就能實現全自動駕駛的夢想嗎?

(注:本文中所有的“全自動駕駛”都是指SAE L4-L5的自動化程度。)
帶著這個問題,車云觀察了國內外幾家典型的公司,并進行了一些分析和比較。
我們發現,許多在國外載客的無人駕駛汽車已經在城市公共道路上行駛。Waymo pod car和英國的Lutz Pathfinder這兩款車在現階段似乎并不特別受歡迎,主要是因為考慮到性價比、傳感器和冗余設計以確保安全會增加許多額外成本(從下表來看,一輛車仍然相當昂貴)。大量新聞的主角是小巴,相對知名的供應商是法國的Navya和EasyMile、美國的Local Motors和日本的SB Drive。

從左到右,從上到下:Arma、EZ10、Olli、SB Drive小巴,圖片來自網絡。

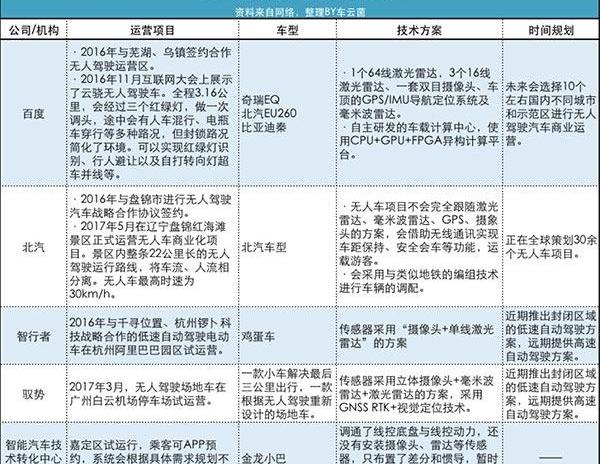
國內無人駕駛汽車主要在景區、公園、停車場等有限的封閉區域運營,包括傳統汽車、小型雙座車和小型客車。大型互聯網公司、主機廠和研究機構已經啟動了相關項目,百度和北汽是代表公司,智行哲和馭勢科技是主要的啟動公司,IVTTC是另一家研究機構。

從左到右,從上到下:百度、北汽、智行、馭勢、IVTTC的無人車,部分圖片來自網絡。
還有一些企業利用機電控制技術曲線,通過安裝磁釘、磁傳感器陣列、導軌等磁導向裝置,實現無人駕駛。當這些車開始在路上忙碌時,我們能高興嗎?答案當然是否定的。
首先,一輛汽車是否是全自動的并不是由是否有司機來判斷的。
在SAE標準(J 30162016版本自動駕駛汽車的定義和分類)中,盡管全自動駕駛確實可以擺脫駕駛員,但一輛名副其實的“自動駕駛”汽車在實時駕駛過程中必須持續滿足以下所有動作:
1.通過轉向對車輛進行橫向控制。
2.通過加速和減速來控制車輛的縱向運動。
3.通過監測、識別和分類障礙物和事件來監測駕駛環境,并為應對做好準備。
4.根據障礙物和道路事件做出反應。
5.制定車輛移動計劃
6.通過燈光、信號和手勢等方式向外界傳遞車輛信息。
目前,我們看到的無人駕駛汽車雖然可以監測環境,做出決策和計劃,并最終做出相應的操作,但還不夠全面。從技術上講,這些汽車仍然無法像人類駕駛員那樣靈活地應對各種情況。我們可以看到,在試運行過程中,人們對車輛的自動駕駛技術不夠自信。當一些汽車進入新城市時,他們不得不安排專人按下緊急制動按鈕。還有一些汽車正在試運行,司機會坐在駕駛座上徒勞地握住方向盤以防萬一。
最重要的是,區分全自動駕駛汽車和駕駛員輔助的關鍵是,當系統無法工作或超出系統的原始操作設計范圍時,系統不會依賴人類,并盡最大努力以安全的方式解決問題。不幸的是,在推出產品時,這些公司都回避了當系統出現故障或超出其能力時,他們是否可以自己拯救這一天。然而,系統穩健性是衡量安全性的重要標準,無法通過短期經驗進行測試。
其次,我們應該理解“有限的環境”是什么意思。
由于自動駕駛系統不夠可靠,它將確保在簡單的環境中安全運行。是否有必要定義環境是L4和L5之間的分界線。以下不是SAE提到的一些資格的完整列表,例如:
速度(高速,……
低速等)
地理地形(平原、山脈等)
道路路面狀況(筆直道路、繞行道路等)
環境(天氣、氣候、基礎設施等)
交通狀況(簡單、復雜、違法行為、固定路線等)
時間段(白天、晚上)
……
當然,L4級自動駕駛汽車可以設置多個有限的環境,這些環境可以自由組合。例如,它只在白天低速行駛,路上沒有行人,因此出現了各種條件有限的自動駕駛汽車。然而,限制設計操作范圍將讓我們看到自動駕駛系統離L5有多遠。如果L4級自動駕駛汽車設置了許多限制,這意味著它仍有許多技術問題需要解決。
例如,許多無人車通過各種限制來簡化駕駛難度。這些無人駕駛汽車行駛速度很慢,因此系統的實時計算能力不是很高。汽車在同一條路線上通勤,所以沒有必要考慮太多的道路變化。車輛也采用相對安全的應對策略。例如,人們很少超車和變道,他們會盡力停車和避讓。
在上述情況下,路況簡單,環境可控,只在白天行駛,表明傳感器和算法無法勝任夜間工作。車輛只能在封閉的公園內行駛,因此高精度地圖不會過多考慮高頻更新。例如,駕駛環境中永遠不應該有人,也不應該有車,這表明在應對復雜路況的感知和決策方面仍有問題需要解決。自動駕駛仍有10%的道路,但剩下的10%需要90%的時間和成本。
此外,我們可以看到,在商業化問題上,它絕不是一家公司來做所有的工作。車企、交通信息公司、解決方案提供商和運營商都將全鏈條參與,為了獲得足夠的利潤空間,他們將盡力掌握核心數據資源。數據的積累和算法的訓練本來就是一個漫長的過程。
總結
自動駕駛可以在不同階段找到商業途徑,讓企業通過盈利獲得良性發展資本。然而,當行業進入自動駕駛發展的關鍵時期時,我們不應該忙于給產品貼上“無人駕駛”的標簽,而應該多談談一些困難的解決方案,讓自動駕駛產品在現實生活中給我們帶來安全舒適的駕駛體驗。許多公司已經開始提供自己的汽車,可以在公園、校園、景點和固定公交線路等有限的環境中載客。在他們的產品宣傳中,我們經常可以看到“無人駕駛”這個高頻詞,不小心收到十幾個“未來來了”的興奮和喜悅!
嘿,等一下,只要方向盤后面沒有司機,我們就能實現全自動駕駛的夢想嗎?
(注:本文中所有的“全自動駕駛”都是指SAE L4-L5的自動化程度。)
帶著這個問題,車云觀察了國內外幾家典型的公司,并進行了一些分析和比較。
我們發現,許多在國外載客的無人駕駛汽車已經在城市公共道路上行駛。Waymo pod car和英國的Lutz Pathfinder這兩款車在現階段似乎并不特別受歡迎,主要是因為考慮到性價比、傳感器和冗余設計以確保安全會增加許多額外成本(從下表來看,一輛車仍然相當昂貴)。大量新聞的主角是小巴,相對知名的供應商是法國的Navya和EasyMile、美國的Local Motors和日本的SB Drive。
從左到右,從上到下:Arma、EZ10、Olli、SB Drive小巴,圖片來自網絡。
國內無人駕駛汽車主要在景區、公園、停車場等有限的封閉區域運營,包括傳統汽車、小型雙座車和小型客車。大型互聯網公司、主機廠和研究機構已經啟動了相關項目,百度和北汽是代表公司,智行哲和馭勢科技是主要的啟動公司,IVTTC是另一家研究機構。
從左到右,從上到下:百度、北汽、智行、馭勢、IVTTC的無人車,部分圖片來自網絡。
還有一些企業利用機電控制技術曲線,通過安裝磁釘、磁傳感器陣列、導軌等磁導向裝置,實現無人駕駛。當這些車開始在路上忙碌時,我們能高興嗎?答案當然是否定的。
首先,一輛汽車是否是全自動的并不是由是否有司機來判斷的。
在SAE標準(J 30162016版本自動駕駛汽車的定義和分類)中,盡管全自動駕駛確實可以擺脫駕駛員,但一輛名副其實的“自動駕駛”汽車在實時駕駛過程中必須持續滿足以下所有動作:
1.通過轉向對車輛進行橫向控制。
2.通過加速和減速來控制車輛的縱向運動。
3.通過監測、識別和分類障礙物和事件來監測駕駛環境,并為應對做好準備。
4.根據障礙物和道路事件做出反應。
5.制定車輛移動計劃
6.通過燈光、信號和手勢等方式向外界傳遞車輛信息。
目前,我們看到的無人駕駛汽車雖然可以監測環境,做出決策和計劃,并最終做出相應的操作,但還不夠全面。從技術上講,這些汽車仍然無法像人類駕駛員那樣靈活地應對各種情況。我們可以看到,在試運行過程中,人們對車輛的自動駕駛技術不夠自信。當一些汽車進入新城市時,他們不得不安排專人按下緊急制動按鈕。還有一些汽車正在試運行,司機會坐在駕駛座上徒勞地握住方向盤以防萬一。
最重要的是,區分全自動駕駛汽車和駕駛員輔助的關鍵是,當系統無法工作或超出系統的原始操作設計范圍時,系統不會依賴人類,并盡最大努力以安全的方式解決問題。不幸的是,在推出產品時,這些公司都回避了當系統出現故障或超出其能力時,他們是否可以自己拯救這一天。然而,系統穩健性是衡量安全性的重要標準,無法通過短期經驗進行測試。
其次,我們應該理解“有限的環境”是什么意思。
由于自動駕駛系統不夠可靠,它將確保在簡單的環境中安全運行。是否有必要定義環境是L4和L5之間的分界線。以下不是SAE提到的一些資格的完整列表,例如:
速度(高速,……
低速等)
地理地形(平原、山脈等)
道路路面狀況(筆直道路、繞行道路等)
環境(天氣、氣候、基礎設施等)
交通狀況(簡單、復雜、違法行為、固定路線等)
時間段(白天、晚上)
……
當然,L4級自動駕駛汽車可以設置多個有限的環境,這些環境可以自由組合。例如,它只在白天低速行駛,路上沒有行人,因此出現了各種條件有限的自動駕駛汽車。然而,限制設計操作范圍將讓我們看到自動駕駛系統離L5有多遠。如果L4級自動駕駛汽車設置了許多限制,這意味著它仍有許多技術問題需要解決。
例如,許多無人車通過各種限制來簡化駕駛難度。這些無人駕駛汽車行駛速度很慢,因此系統的實時計算能力不是很高。汽車在同一條路線上通勤,所以沒有必要考慮太多的道路變化。車輛也采用相對安全的應對策略。例如,人們很少超車和變道,他們會盡力停車和避讓。
在上述情況下,路況簡單,環境可控,只在白天行駛,表明傳感器和算法無法勝任夜間工作。車輛只能在封閉的公園內行駛,因此高精度地圖不會過多考慮高頻更新。例如,駕駛環境中永遠不應該有人,也不應該有車,這表明在應對復雜路況的感知和決策方面仍有問題需要解決。自動駕駛仍有10%的道路,但剩下的10%需要90%的時間和成本。
此外,我們可以看到,在商業化問題上,它絕不是一家公司來做所有的工作。車企、交通信息公司、解決方案提供商和運營商都將全鏈條參與,為了獲得足夠的利潤空間,他們將盡力掌握核心數據資源。數據的積累和算法的訓練本來就是一個漫長的過程。
總結
自動駕駛可以在不同階段找到商業途徑,讓企業通過盈利獲得良性發展資本。然而,當行業進入自動駕駛發展的關鍵時期時,我們不應該忙于給產品貼上“無人駕駛”的標簽,而應該多談談一些困難的解決方案,讓自動駕駛產品在現實生活中給我們帶來安全舒適的駕駛體驗。
標簽:發現
共享汽車領域是個規模經濟,市場規模如網點覆蓋密度、運營的車輛數量與企業運營成本成反比。
1900/1/1 0:00:00尾號限行措施將繼續實施一年,北京市政府近日發布通告,決定自2017年4月10日至2018年4月8日,繼續實施工作日高峰時段區域限行交通管理措施。
1900/1/1 0:00:00據《日本經濟新聞》3月23日報道,日本豐田汽車與日本通信運營商NTT將就汽車的超高速無線通信技術方面開展合作。雙方將利用5G技術,盡快推動安全性更高的自動駕駛汽車實現實用化。
1900/1/1 0:00:00格力電器年報披露前夕,董明珠再度增持珠海銀隆。珠海市工商局公開信息顯示,董明珠個人出資金額已達1927億元,持股比例上升為1746,超過陽光人壽成為第二大股東,僅次于廣東銀通的26。
1900/1/1 0:00:002017年4月6日,中國化學與物理電源行業協會簡稱協會和動力電池應用分會共同組織的“《鋰離子電池企業安全生產規范》協會標準工作組啟動會”在天津召開。
1900/1/1 0:00:002014年,Cubic曾與奧迪合作打造奧迪的智能網聯信息娛樂系統。
1900/1/1 0:00:00