近日,在一場全球智能汽車前沿峰會上,如何解決自動駕駛安全問題成為與會專家學者和企業代表關注的焦點。事實上,雖然用戶已經享受到了一些自動駕駛技術帶來的便利,但現實生活中關于自動駕駛安全性的討論卻從未停止。特斯拉在全球的一系列事故就是很好的案例。其中,最近發生的一起特斯拉ModeModel 3(自動駕駛自動輔助駕駛系統)被開啟追尾一輛靜止拖車的事故引起了外界的高度關注。令外界不解的是:面對道路前方這么大的障礙物,Autopilot自動輔助駕駛系統為什么會“隱形”?

如果沒有機器識別訓練,汽車只會恐慌。在普通人的認知中,靜止的大障礙物是一個非常容易識別的物體。為什么特斯拉Autopilot系統無法識別?這些傳感器都是名存實亡嗎?對此,李CEO李想在微博中發表了自己的看法:“目前攝像頭和毫米波雷達的結合就像青蛙的眼睛,可以很好的判斷動態物體,但對于非標準的靜態物體幾乎無能為力。這個層面的視覺進步幾乎停滯。即使是動態的,車外識別率也低于80%。自動駕駛的時候不要真的用。”

在這種情況下,自動駕駛識別靜物的難度在哪里?對安裝在車身上的攝像頭、雷達等傳感器有什么要求?對此,汽車之家采訪了法雷奧中國首席技術官顧建民和大陸先進駕駛輔助系統中國區負責人唐海毅,從感知即傳感器的角度來分析這些問題。首先,我們來說說什么是“感知”。在自動駕駛的整個方案中(包括感知層、決策層和執行層),最熱鬧的板塊是感知決策層,這是人工智能下大力氣的領域。感知是自動駕駛系統收集外界環境信息并進行識別的能力,相當于駕駛員對駕駛環境的觀察。目前,自動駕駛的感知層是通過多種傳感器來實現的。主要有激光雷達、相機、毫米波雷達、超聲波傳感器。各種傳感器的特性不一樣,每個傳感器都有自己的優缺點。面對復雜的行駛環境,單個傳感器的數據無法滿足各種環境下感知環境的需要。

對于傳感器識別靜態物體的難度,顧建民認為,“對于相機來說,需要機器學習來訓練和識別物體。但是靜態物體的種類和形狀很多,沒有樣本訓練是無法識別的。諸如撞上消防車車尾或形狀怪異的隔離墩欄桿之類的事故,應該是因為缺少這種樣本訓練造成的。此外,在識別物體時,前置攝像頭對天氣和光照條件也很敏感;對于快速移動的汽車,前置攝像頭通常最終會捕捉到模糊或失真的物體圖像。”“對于毫米波雷達來說,主要是受目標對電磁波反射的靈敏度影響,一些橡膠類的靜態物體反射不好,識別起來會比較困難。此外,雷達幾乎無法區分龍門架、路邊的金屬標志或停在路上的靜止汽車,因為雷達的空間分辨率很差,相對于路面不動的雷達回波通常只能在算法中忽略。不然每次經過路標之類的靜物,車都會慌。”顧建民補充道。
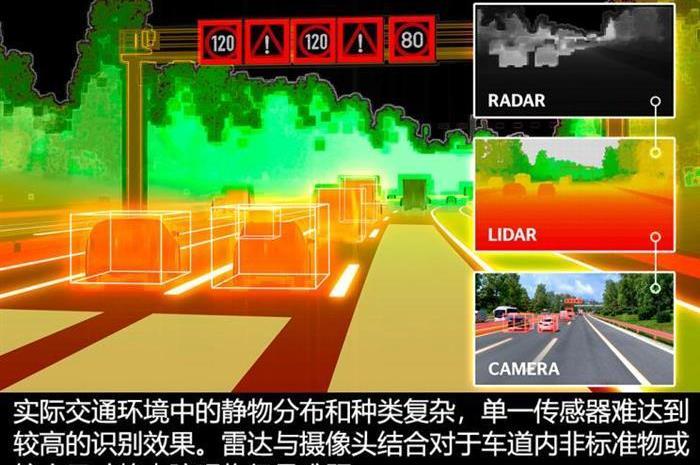
唐海毅在接受汽車之家采訪時也表達了類似的觀點。在他看來,實際交通環境中的靜物分布和種類比較復雜,簡單的傳感器很難達到很高的識別效果。比如雷達的優勢在于測速和測距,但對于體積小、反射弱的靜物就沒有優勢。相機的優勢是可以獲取豐富的環境信息,可以利用機器學習對目標進行分類,但在測速測距方面不如雷達。唐海毅進一步解釋說,雷達和攝像頭的結合可以相對實現對一些標準靜態障礙物的識別。但即便如此,車道內出現非標準物體或小型靜態障礙物(10-20CM)仍然是個問題,因為此時雷達基本無效,甚至機器學習也無法識別未經訓練的障礙物,而要實現對地面小型靜態障礙物的檢測,對攝像頭的檢測距離、精度和視角都有很高的要求。馬斯克鄙視的激光雷達潛力巨大。這種情況下,目前沒有更好的解決方案嗎?mainland China和法雷奧在自動駕駛汽車領域有哪些識別靜態物體的解決方案?顧建民說:“法雷奧的ScaLa激光掃描儀(lidar)可以解決這些問題中的大部分,可以很好地檢測靜態或移動的物體,無論白天還是晚上。”
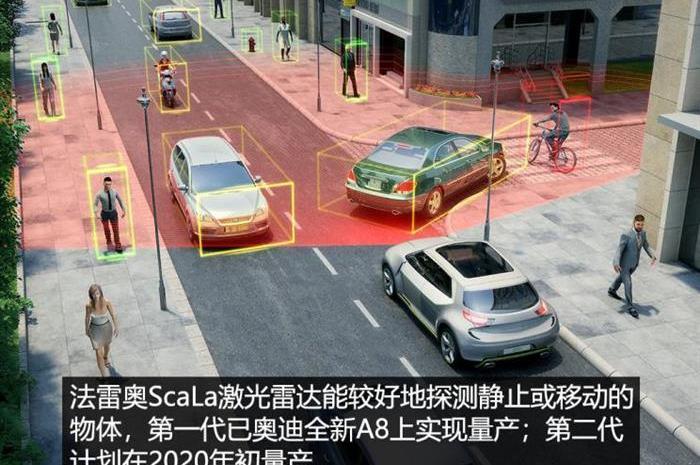
事實上,第一代法雷奧ScaLa早在2017年11月就已經在奧迪全新A8上量產。據顧建民透露,ScaLa二代計劃于2020年初量產。法雷奧的低速自動泊車是利用攝像頭計算機視覺三維目標檢測,并集成超聲波或毫米波雷達等其他傳感器來解決的。自動泊車有量產車型。

說到激光雷達,業界肯定會想到馬斯克今年4月公開的diss激光雷達。當時他曾直言“只有傻子才用激光雷達,現在誰用激光雷達誰就完了。”這個說法造成了激光雷達和相機的技術差異。對此,一位行業分析師表示:“一旦將這些理論技術應用到現實中,就有很多無法回避的未知。理論上,僅通過攝像頭收集數據或許是可行的,但如果你想完全相信系統的判斷是正確的,最好是集成其他傳感器來輔助,比如激光雷達。”客觀來說,馬斯克追求特斯拉未來的攝像頭+毫米波雷達+AI芯片的自動駕駛系統,也有自己的考慮。汽車之家早前采訪激光雷達公司威力登時,相關負責人告訴汽車之家,他可以理解特斯拉的立場,即對于一家以“自動駕駛”為主要賣點的量產車公司,特斯拉需要考慮很多成本因素。

“特斯拉CEO馬斯克”然而,自動駕駛關系到車輛安全和生命安全。檢測各種靜態物體,需要建立并持續維護一個龐大的樣本特征數據庫,以保證這個數據庫包含待識別目標的所有特征數據。顯然,從目前來看,難度相當大,做不到。對于激光雷達來說,不依賴于環境光,可以直接進行三維探測和成像,識別靜物更加準確可靠。雖然它目前的成本相當高,但未來隨著市場化,它的價格會逐漸降低。將激光雷達與雷達和照相機結合起來可以更好地識別障礙物……sla看不到,提高行車安全。再進一步想,消費者可能又會問,那輛車上多裝幾個激光雷達、毫米波雷達、攝像頭,不就可以實現無人駕駛了嗎?可惜,答案是否定的!因為傳感器代替不了大腦,感知代替不了認知。我們應該認識到,任何傳感器都不能保證在任何情況下提供完全可靠的信息。一個很簡單的道理,如果一個孩子告訴你他有超能力,能準確感知200米內的一切,你覺得他是“老司機”嗎?不要!孩子連車都沒開過,超能力除了能看清楚,也教不了他怎么開車。自動輔助駕駛≠自動駕駛不要拿生命開玩笑。在自動駕駛技術還沒有那么完善的時候,人和自動駕駛汽車的交互就很重要,既敏捷又全面。司機需要加強理論素養,理論素養到位,才不會盲目相信自動駕駛功能,導致事故發生。

特斯拉車主在行駛過程中睡著的場景讓人感到擔憂。盡管特斯拉一再重申,司機應該始終把手放在方向盤上,隨時準備接管車輛,但仍有汽車主要反其道而行之。不知道如果前面有障礙物,你的車就“看不見”了。駕駛員需要知道的是,L2駕駛輔助系統要求駕駛員保持注意力以監控環境,并且車輛由駕駛員和系統控制。L3級自動駕駛汽車需要駕駛員在無法應對時接管車輛。只有L4和L5自動駕駛汽車的駕駛員才能解放雙手。但基于現有的技術和法律法規,距離L4及以上級別的量產還有一段距離。所以在駕駛員接觸自動駕駛汽車輔助系統的初始階段,如果駕駛員對“自動駕駛”沒有完全理解,很容易出現一些情況。事實上,裝有自動駕駛輔助系統的車輛一般會以各種形式向駕駛員顯示相關的重要信息,如開啟模式、接管模式、預警模式、含義等。這些操作規范的信息傳遞,將使駕駛員快速、直觀地了解“自動駕駛”。

說白了,你可以把一輛有自動駕駛輔助系統的車輛想象成一個小學生在做作業,還需要老師幫你解決難題。最后給用戶一些友好的建議:基于現有技術和法律法規的要求,在啟用輔助駕駛時,雙手保持在方向盤上,隨時做好接管車輛的準備。一定要注意路況,在強光和逆光下開車要控制好方向盤和車速,高速行駛要控制好與前方車輛的距離,腳放在剎車踏板上保持合理的車距,從大量的事故案例中吸取教訓。編輯總結:目前全球自動駕駛水平仍處于L3-L4突破階段,所有車輛上的自動駕駛功能只能起到輔助作用。面對一個新的技術和應用,用戶的理解可能和生產者、技術人員不是一個層次的,用戶的理解往往是有偏差的。所以廠家更應該謹慎,對用戶的安全負責。同時,對于自動駕駛,消費者既要有感性的熱情,也要有理性的思考,這才是我們應該提倡的心態。近日,在一場全球智能汽車前沿峰會上,如何解決自動駕駛安全問題成為與會專家學者和企業代表關注的焦點。事實上,雖然用戶已經享受到了一些自動駕駛技術帶來的便利,但現實生活中關于自動駕駛安全性的討論卻從未停止。特斯拉在全球的一系列事故就是很好的案例。其中,最近發生的一起特斯拉ModeModel 3(自動駕駛自動輔助駕駛系統)被開啟追尾一輛靜止拖車的事故引起了外界的高度關注。令外界不解的是:面對道路前方這么大的障礙物,Autopilot自動輔助駕駛系統為什么會“隱形”?
如果沒有機器識別訓練,汽車只會恐慌。在普通人的認知中,靜止的大障礙物是一個非常容易識別的物體。為什么特斯拉Autopilot系統無法識別?這些傳感器都是名存實亡嗎?對此,李CEO李想在微博中發表了自己的看法:“目前攝像頭和毫米波雷達的結合就像青蛙的眼睛,可以很好的判斷動態物體,但是我……對于非標準靜態對象幾乎無能為力。這個層面的視覺進步幾乎停滯。即使是動態的,車外識別率也低于80%。自動駕駛的時候不要真的用。"
在這種情況下,自動駕駛識別靜物的難度在哪里?對安裝在車身上的攝像頭、雷達等傳感器有什么要求?對此,汽車之家采訪了法雷奧中國首席技術官顧建民和大陸先進駕駛輔助系統中國區負責人唐海毅,從感知即傳感器的角度來分析這些問題。首先,我們來說說什么是“感知”。在自動駕駛的整個方案中(包括感知層、決策層和執行層),最熱鬧的板塊是感知決策層,這是人工智能下大力氣的領域。感知是自動駕駛系統收集外界環境信息并進行識別的能力,相當于駕駛員對駕駛環境的觀察。目前,自動駕駛的感知層是通過多種傳感器來實現的。主要有激光雷達、相機、毫米波雷達、超聲波傳感器。各種傳感器的特性不一樣,每個傳感器都有自己的優缺點。面對復雜的行駛環境,單個傳感器的數據無法滿足各種環境下感知環境的需要。
對于傳感器識別靜態物體的難度,顧建民認為,“對于相機來說,需要機器學習來訓練和識別物體。但是靜態物體的種類和形狀很多,沒有樣本訓練是無法識別的。諸如撞上消防車車尾或形狀怪異的隔離墩欄桿之類的事故,應該是因為缺少這種樣本訓練造成的。此外,在識別物體時,前置攝像頭對天氣和光照條件也很敏感;對于快速移動的汽車,前置攝像頭通常最終會捕捉到模糊或失真的物體圖像。”“對于毫米波雷達來說,主要是受目標對電磁波反射的靈敏度影響,一些橡膠類的靜態物體反射不好,識別起來會比較困難。此外,雷達幾乎無法區分龍門架、路邊的金屬標志或停在路上的靜止汽車,因為雷達的空間分辨率很差,相對于路面不動的雷達回波通常只能在算法中忽略。不然每次經過路標之類的靜物,車都會慌。”顧建民補充道。
唐海毅在接受汽車之家采訪時也表達了類似的觀點。在他看來,實際交通環境中的靜物分布和種類比較復雜,簡單的傳感器很難達到很高的識別效果。比如雷達的優勢在于測速和測距,但對于體積小、反射弱的靜物就沒有優勢。相機的優勢是可以獲取豐富的環境信息,可以利用機器學習對目標進行分類,但在測速測距方面不如雷達。唐海毅進一步解釋說,雷達和攝像頭的結合可以相對實現對一些標準靜態障礙物的識別。但即便如此,車道內出現非標準物體或小型靜態障礙物(10-20CM)仍然是個問題,因為此時雷達基本無效,甚至機器學習也無法識別未經訓練的障礙物,而要實現對地面小型靜態障礙物的檢測,對攝像頭的檢測距離、精度和視角都有很高的要求。馬斯克鄙視的激光雷達潛力巨大。這種情況下,目前沒有更好的解決方案嗎?mainland China和法雷奧在自動駕駛汽車領域有哪些識別靜態物體的解決方案?顧建民說:“法雷奧的ScaLa激光掃描儀(lidar)可以解決這些問題中的大部分,可以很好地檢測靜態或移動的物體,無論白天還是晚上。”
事實上,第一代法雷奧ScaLa早在2017年11月就已經在奧迪全新A8上量產。據顧建民透露,ScaLa二代計劃于2020年初量產。法雷奧的低速自動泊車是利用攝像頭計算機視覺三維目標檢測,并集成超聲波或毫米波雷達等其他傳感器來解決的。自動泊車有量產車型。
說到激光雷達,業界肯定會想到馬斯克今年4月公開的diss激光雷達。當時他曾直言“只有傻子才用激光雷達,現在誰用激光雷達誰就完了。”這個說法造成了激光雷達和相機的技術差異。對此,一位行業分析師表示:“一旦將這些理論技術應用到現實中,就有很多無法回避的未知。理論上,僅通過攝像頭收集數據或許是可行的,但如果你想完全相信系統的判斷是正確的,最好是集成其他傳感器來輔助,比如激光雷達。”客觀來說,馬斯克追求特斯拉未來的攝像頭+毫米波雷達+AI芯片的自動駕駛系統,也有自己的考慮。汽車之家早前采訪激光雷達公司威力登時,相關負責人告訴汽車之家,他可以理解特斯拉的立場,即對于一家以“自動駕駛”為主要賣點的量產車公司,特斯拉需要考慮很多成本因素。
“特斯拉CEO馬斯克”然而,自動駕駛關系到車輛安全和生命安全。檢測各種靜態物體,需要建立并持續維護一個龐大的樣本特征數據庫,以保證這個數據庫包含待識別目標的所有特征數據。顯然,從目前來看,難度相當大,做不到。對于激光雷達來說,不依賴于環境光,可以直接進行三維探測和成像,識別靜物更加準確可靠。雖然它目前的成本相當高,但未來隨著市場化,它的價格會逐漸降低。將激光雷達與雷達和照相機結合起來可以更好地識別障礙物……sla看不到,提高行車安全。再進一步想,消費者可能又會問,那輛車上多裝幾個激光雷達、毫米波雷達、攝像頭,不就可以實現無人駕駛了嗎?可惜,答案是否定的!因為傳感器代替不了大腦,感知代替不了認知。我們應該認識到,任何傳感器都不能保證在任何情況下提供完全可靠的信息。一個很簡單的道理,如果一個孩子告訴你他有超能力,能準確感知200米內的一切,你覺得他是“老司機”嗎?不要!孩子連車都沒開過,超能力除了能看清楚,也教不了他怎么開車。自動輔助駕駛≠自動駕駛不要拿生命開玩笑。在自動駕駛技術還沒有那么完善的時候,人和自動駕駛汽車的交互就很重要,既敏捷又全面。司機需要加強理論素養,理論素養到位,才不會盲目相信自動駕駛功能,導致事故發生。
特斯拉車主在行駛過程中睡著的場景讓人感到擔憂。盡管特斯拉一再重申,司機應該始終把手放在方向盤上,隨時準備接管車輛,但仍有汽車主要反其道而行之。不知道如果前面有障礙物,你的車就“看不見”了。駕駛員需要知道的是,L2駕駛輔助系統要求駕駛員保持注意力以監控環境,并且車輛由駕駛員和系統控制。L3級自動駕駛汽車需要駕駛員在無法應對時接管車輛。只有L4和L5自動駕駛汽車的駕駛員才能解放雙手。但基于現有的技術和法律法規,距離L4及以上級別的量產還有一段距離。所以在駕駛員接觸自動駕駛汽車輔助系統的初始階段,如果駕駛員對“自動駕駛”沒有完全理解,很容易出現一些情況。事實上,裝有自動駕駛輔助系統的車輛一般會以各種形式向駕駛員顯示相關的重要信息,如開啟模式、接管模式、預警模式、含義等。這些操作規范的信息傳遞,將使駕駛員快速、直觀地了解“自動駕駛”。
說白了,你可以把一輛有自動駕駛輔助系統的車輛想象成一個小學生在做作業,還需要老師幫你解決難題。最后給用戶一些友好的建議:基于現有技術和法律法規的要求,在啟用輔助駕駛時,雙手保持在方向盤上,隨時做好接管車輛的準備。一定要注意路況,在強光和逆光下開車要控制好方向盤和車速,高速行駛要控制好與前方車輛的距離,腳放在剎車踏板上保持合理的車距,從大量的事故案例中吸取教訓。編輯總結:目前全球自動駕駛水平仍處于L3-L4突破階段,所有車輛上的自動駕駛功能只能起到輔助作用。面對一個新的技術和應用,用戶的理解可能和生產者、技術人員不是一個層次的,用戶的理解往往是有偏差的。所以廠家更應該謹慎,對用戶的安全負責。同時,對于自動駕駛,消費者既要有感性的熱情,也要有理性的思考,這才是我們應該提倡的心態。
日前,我從長安歐尚官方了解到,旗下全新緊湊型SUV歐尚X7將于10月8日開啟預售。同時,新車未來將提供燃油版、混動版、EV版三種動力版本,并有望于11月上市銷售。
1900/1/1 0:00:00據外媒報道,由于歐盟要求菲亞特克萊斯勒汽車公司(FCA)向盧森堡支付高達3000萬歐元(3300萬美元)的補繳稅款,FCA進行上訴但是失敗了。
1900/1/1 0:00:00圖片來自“億歐網”蔚來發布了2019Q2財報后,資本市場迅速做出了反應:美國時間9月24日早,在美股小幅高開的背景下,蔚來一度跌幅超過26,股價創歷史新低,低至197美元。
1900/1/1 0:00:00此前我們曾報道過AMG計劃推出搭載插電式混合動力混合動力系統的AMGGT,就在近日,AMG董事會主席TobiasMoers在接受外媒采訪時透露,
1900/1/1 0:00:00如果你喜歡運動型駕駛,又不喜歡長時間為汽車充電,那么保時捷Taycan車型可能適合你,因為該車型無需4分鐘就可以充滿電,而且NEDC工況下的續航里程為100km。
1900/1/1 0:00:00不出所料,蔚來汽車第二季度財務情況并不理想:虧損加大、銷量下滑的經營狀況,將蔚來汽車再一次推上風口浪尖。
1900/1/1 0:00:00