
CIDI自動駕駛重型卡車在日常生活中,汽車由司機駕駛。在駕駛過程中,我們完全不知道視線之外的信息,在緊急情況下無法提前預測。我記得小時候看科幻電影《我,機器人》時,我被電影中的主人公“一輛可以自動駕駛的汽車”深深吸引,并崇拜電影中的超能力。它將主動加速和減速,以避開過往車輛,并提前預測前方道路的交通狀況。當我們還沉浸在科幻小說的焦點平面中時,科幻小說就變成了現實。隨著自動駕駛技術的成熟,這將是未來汽車發展的必然趨勢。目前,參與自動駕駛領域的各大車企和科技公司都在努力開發自動駕駛技術。CIDI是一家專門從事智能駕駛技術研發的公司,已成功應用于重型卡車、特種車輛和車路協同領域。讓我們來看看自動駕駛。自動駕駛的級別分為五個級別。當它達到第五級時,就是我們通常所說的全自動駕駛,但這些并不是真正意義上的自動駕駛。那么什么是真正的自動駕駛呢?必要條件是什么?

CIDI自動駕駛測試場(高速公路路段)實現自動駕駛的硬件條件目前,傳感器是半自動駕駛必不可少的,也是未來自動駕駛車輛最基本的。車載雷達可分為三種類型:聲雷達、光雷達和毫米波雷達,可以探測周圍環境。同時,車輛的攝像頭和掃描儀構成了車輛的基本檢測系統。為了實現車輛的自動駕駛,高精度地圖自然必不可少。就目前的地圖而言,它可以幫助司機規劃路線,同時可以根據司機的喜好進行選擇,例如避免擁堵、優先考慮高速、耗時最短。同時,地圖還可以顯示擁堵情況。然而,這些信息并不能很好地支持自動駕駛汽車的使用,需要更多樣化的信息,如實時道路信息和紅綠燈的時間間隔。
除了上述技術外,車路協同還可以實現自動駕駛。如果你想將自動駕駛提高到一個更高的水平,你需要使用智能汽車基礎設施合作系統。智能車輛基礎設施協同系統,即IVICS(Intelligent Vehicle Infrastructure Cooperative Systems,簡稱IVICS),或智能車輛基礎結構協同系統,是ITS未來的發展方向。它采用無線通信、互聯網、傳感器檢測等技術,全方位實現車輛與道路之間的動態實時信息交互,并在全時動態交通信息收集和集成的基礎上,進行主動的車輛安全控制和道路協同管理,充分實現人與人之間的有效協調,車輛和道路,確保交通安全,提高交通效率。車路協同有三個技術指標,一是強調人車路系統的協同,二是強調區域大規模聯網的聯合控制,三是強調使用多式聯運網絡和信息交互。這項技術是信息技術與汽車和交通行業融合的結果,那么這項技術會給我們帶來什么便利呢?智能車輛基礎設施協同系統中的碰撞預警功能將提前告知“哪些車輛存在潛在的碰撞危險”,預測潛在的安全隱患,并提醒駕駛員提前變道并及時避讓。虛擬路標會告知道路上標記的信息,并可以提前通知駕駛員注意落石或急轉彎。十字路口的交通信號燈也提醒人們注意。超視距感知系統實時獲取路況和汽車狀況,并將看不見的路障信息發送給ca……
提前提醒駕駛員變道或避讓。隨著自動駕駛領域的不斷發展,許多涉及自動駕駛系統技術的企業紛紛加入,近日,鈦媒體訪問了長沙市自動駕駛研究院(以下簡稱“CIDI”)。這是一家專門從事智能駕駛技術研發的公司。它利用多種傳感器、高精度定位和道路數據互聯共享實現自動駕駛,并將自動駕駛的研發和落地方向定位在重型卡車、特種車輛和道路協同領域。

自動駕駛重卡試駕體驗目前,自動駕駛功能已經在重卡上實現。

我登上卡車,向司機的主人打招呼。師傅笑著說:“我現在正在叫保安,因為科技的飛速發展,司機會失業的。”坐穩后,卡車緩緩駛上高速測試路,并逐漸開始加速。屏幕顯示速度為103公里/小時。當其他車輛出現在視線范圍內時,很明顯卡車在減速的同時開始變道。同車的技術專家告訴鈦媒體,事實上,這輛車知道前方道路的信息,并計算前方車輛的速度,以測試其車身姿態是否有變道的意圖,因此卡車在制動時完成了變道并避讓。

當速度超過100公里/小時時,CIDI如何實現重型卡車的自動駕駛?它不依賴于單一的自動駕駛系統(超出上述條件),而是依賴于智能網絡化道路管理系統(CRSS)。我們可以簡單地將CRSS視為智能車輛基礎設施合作系統的升級版。根據不同的應用場景,系統提供了四層計算架構:車側計算、路邊邊緣計算、中央云計算和移動計算。CRSS主要由智能網絡路側單元、邊緣計算單元和路側傳感器組成。該系統集成了傳感、高精度定位和V2X通信等功能。車載數據傳輸主要由車載單元(OBU)和手機APP組成。車載終端主要集成了V2X通信、V2X算法決策、APP終端顯示、自動駕駛控制等功能。

通過智能汽車基礎設施協同系統,實現自動掉頭汽車聯網是解決無人駕駛最后1%的關鍵。“無人駕駛的最后1%非常困難。如果不解決,它就不會落地。”馬偉博士曾說過這樣一句話。與許多車企單一研發L3或L4不同,CIDI是基于L4技術來制造可以落地的產品。車聯網是解決無人駕駛最后1%問題的關鍵。盡管車聯網的概念已經被猜測了很多年,但事實上,低延遲的車聯網仍然很少。傳統的車輛聯網往往通過在車輛上加載4G通信模塊來實現車輛運行狀態的反饋,這使得數據傳輸相對較慢,實時性相對較差。CIDI的車聯網解決方案是通過低延遲通信解決最后1%的不可預測問題,無人應用專注于特殊場景,如公園和礦山。所涉及的核心技術包括多傳感器融合、深度學習、自主決策、高效計算機、高精度定位、V2V和V2X車輛聯網,以完成最后的1%。

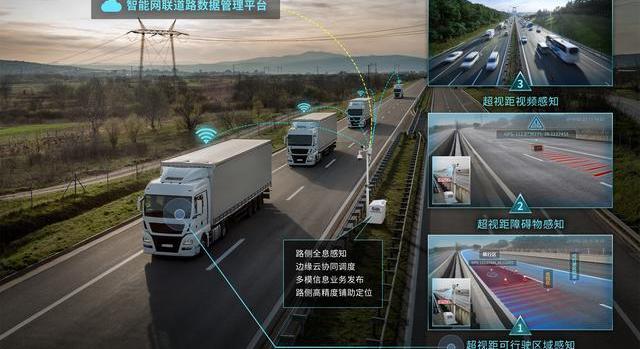
智能網聯道路管理系統CRSSCIDI的車路協同(超視距感知)的獨特功能是,車輛在高速場景中需要較長的安全距離,而車載傳感器的極限感知能力只有100至200米,無法滿足其在某些車輛或場景中的安全性。此時,沿線部署的CRSS可以通過其超視距感知能力,有效增強自動駕駛的安全性。超視距感知包括以下三個方面:超視距障礙物檢測:w……
當視線范圍外的道路上有障礙物時,CRSS可以在駕駛員視線范圍外提前感知結果,并將其廣播給靠近該位置的車輛,提醒他們提前做出決定。超視距駕駛區域檢測:為了應對道路施工、道路坑洞和交通事故等特殊事件的發生,道路的駕駛區域也會實時變化。這個時候,如果你按照車內存儲的歷史地圖自己開車,很容易發生交通事故。CRSS提前感知到這一區域,并將其廣播給接近的自動駕駛汽車,提醒他們提前變道。超視距視頻感知:CRSS將采集到的路側視頻數據通過V2I傳輸到自動駕駛汽車的感知層進行決策分析,從而將自動駕駛汽車感知能力擴展到1公里左右,大大提高了高速自動駕駛的安全性。經過短短一天的試乘體驗,簡單地總結一下,僅靠車輛智能化是不可能完全實現L4級自動駕駛的,而是將車輛和道路結合起來共享和傳輸數據,從而實現以CIDI為主導的車路協同研發理念,這就很容易實現車輛的自動駕駛。今天的車路協同是智能化、數字化和互聯的車輛、道路和交通環境的融合。在物聯網的發展趨勢下,這也是自動駕駛和未來流量將達到的場景。CIDI依靠多傳感器融合、深度學習、自主決策、高效計算、高精度定位以及V2V和V2X車聯網,實現車路協同下的自動駕駛。在現實中,自動駕駛的應用意義深遠,但車輛和道路的協同自動駕駛還需要更多的經驗和探索。
CIDI自動駕駛重型卡車在日常生活中,汽車由司機駕駛。在駕駛過程中,我們完全不知道視線之外的信息,在緊急情況下無法提前預測。我記得小時候看科幻電影《我,機器人》時,我被電影中的主人公“一輛可以自動駕駛的汽車”深深吸引,并崇拜電影中的超能力。它將主動加速和減速,以避開過往車輛,并提前預測前方道路的交通狀況。當我們還沉浸在科幻小說的焦點平面中時,科幻小說就變成了現實。隨著自動駕駛技術的成熟,這將是未來汽車發展的必然趨勢。目前,參與自動駕駛領域的各大車企和科技公司都在努力開發自動駕駛技術。CIDI是一家專門從事智能駕駛技術研發的公司,已成功應用于重型卡車、特種車輛和車路協同領域。讓我們來看看自動駕駛。自動駕駛的級別分為五個級別。當它達到第五級時,就是我們通常所說的全自動駕駛,但這些并不是真正意義上的自動駕駛。那么什么是真正的自動駕駛呢?必要條件是什么?
CIDI自動駕駛測試場(高速公路路段)實現自動駕駛的硬件條件目前,傳感器是半自動駕駛必不可少的,也是未來自動駕駛車輛最基本的。車載雷達可分為三種類型:聲雷達、光雷達和毫米波雷達,可以探測周圍環境。同時,車輛的攝像頭和掃描儀構成了車輛的基本檢測系統。為了實現車輛的自動駕駛,高精度地圖自然必不可少。就目前的地圖而言,它可以幫助司機規劃路線,同時可以根據司機的喜好進行選擇,例如避免擁堵、優先考慮高速、耗時最短。同時,地圖還可以顯示擁堵情況。然而,這些信息并不能很好地支持自動駕駛汽車的使用,需要更多樣化的信息,如實時道路信息和紅綠燈的時間間隔。
1/3.jpg“/>
除了上述技術外,車路協同還可以實現自動駕駛。如果你想將自動駕駛提高到一個更高的水平,你需要使用智能汽車基礎設施合作系統。智能車輛基礎設施協同系統,即IVICS(Intelligent Vehicle Infrastructure Cooperative Systems,簡稱IVICS),或智能車輛基礎結構協同系統,是ITS未來的發展方向。它采用無線通信、互聯網、傳感器檢測等技術,全方位實現車輛與道路之間的動態實時信息交互,并在全時動態交通信息收集和集成的基礎上,進行主動的車輛安全控制和道路協同管理,充分實現人與人之間的有效協調,車輛和道路,確保交通安全,提高交通效率。車路協同有三個技術指標,一是強調人車路系統的協同,二是強調區域大規模聯網的聯合控制,三是強調使用多式聯運網絡和信息交互。這項技術是信息技術與汽車和交通行業融合的結果,那么這項技術會給我們帶來什么便利呢?智能車輛基礎設施協同系統中的碰撞預警功能將提前告知“哪些車輛存在潛在的碰撞危險”,預測潛在的安全隱患,并提醒駕駛員提前變道并及時避讓。虛擬路標會告知道路上標記的信息,并可以提前通知駕駛員注意落石或急轉彎。十字路口的交通信號燈也提醒人們注意。超視距感知系統實時獲取路況和車況,并提前將看不見的路障信息發送給汽車,提醒駕駛員變道或避讓。隨著自動駕駛領域的不斷發展,許多涉及自動駕駛系統技術的企業紛紛加入,近日,鈦媒體訪問了長沙市自動駕駛研究院(以下簡稱“CIDI”)。這是一家專門從事智能駕駛技術研發的公司。它利用多種傳感器、高精度定位和道路數據互聯共享實現自動駕駛,并將自動駕駛的研發和落地方向定位在重型卡車、特種車輛和道路協同領域。
自動駕駛重卡試駕體驗目前,自動駕駛功能已經在重卡上實現。
我登上卡車,向司機的主人打招呼。師傅笑著說:“我現在正在叫保安,因為科技的飛速發展,司機會失業的。”坐穩后,卡車緩緩駛上高速測試路,并逐漸開始加速。屏幕顯示速度為103公里/小時。當其他車輛出現在視線范圍內時,很明顯卡車在減速的同時開始變道。同車的技術專家告訴鈦媒體,事實上,這輛車知道前方道路的信息,并計算前方車輛的速度,以測試其車身姿態是否有變道的意圖,因此卡車在制動時完成了變道并避讓。
當速度超過100公里/小時時,CIDI如何實現重型卡車的自動駕駛?它不依賴于單一的自動駕駛系統(超出上述條件),而是依賴于智能網絡化道路管理系統(CRSS)。我們可以簡單地將CRSS視為智能車輛基礎設施合作系統的升級版。根據不同的應用場景,系統提供了四層計算架構:車側計算、路邊邊緣計算、中央云計算和移動計算。CRSS主要由智能網絡路側單元、邊緣計算單元和路側傳感器組成。該系統集成了傳感、高精度定位和V2X通信等功能。車載數據傳輸主要由車載單元(OBU)和手機APP組成。車載終端主要集成了V2X通信、V2X算法決策……
APP終端顯示、自動駕駛控制等功能。
通過智能汽車基礎設施協同系統,實現自動掉頭汽車聯網是解決無人駕駛最后1%的關鍵。“無人駕駛的最后1%非常困難。如果不解決,它就不會落地。”馬偉博士曾說過這樣一句話。與許多車企單一研發L3或L4不同,CIDI是基于L4技術來制造可以落地的產品。車聯網是解決無人駕駛最后1%問題的關鍵。盡管車聯網的概念已經被猜測了很多年,但事實上,低延遲的車聯網仍然很少。傳統的車輛聯網往往通過在車輛上加載4G通信模塊來實現車輛運行狀態的反饋,這使得數據傳輸相對較慢,實時性相對較差。CIDI的車聯網解決方案是通過低延遲通信解決最后1%的不可預測問題,無人應用專注于特殊場景,如公園和礦山。所涉及的核心技術包括多傳感器融合、深度學習、自主決策、高效計算機、高精度定位、V2V和V2X車輛聯網,以完成最后的1%。
智能網聯道路管理系統CRSSCIDI的車路協同(超視距感知)的獨特功能是,車輛在高速場景中需要較長的安全距離,而車載傳感器的極限感知能力只有100至200米,無法滿足其在某些車輛或場景中的安全性。此時,沿線部署的CRSS可以通過其超視距感知能力,有效增強自動駕駛的安全性。超視距感知包括以下三個方面:超視距障礙物檢測:當視線范圍外的道路上有障礙物時,CRSS可以在駕駛員視線范圍外提前感知結果,并將其廣播給靠近該位置的車輛,提醒其提前做出決定。超視距駕駛區域檢測:為了應對道路施工、道路坑洞和交通事故等特殊事件的發生,道路的駕駛區域也會實時變化。這個時候,如果你按照車內存儲的歷史地圖自己開車,很容易發生交通事故。CRSS提前感知到這一區域,并將其廣播給接近的自動駕駛汽車,提醒他們提前變道。超視距視頻感知:CRSS將采集到的路側視頻數據通過V2I傳輸到自動駕駛汽車的感知層進行決策分析,從而將自動駕駛汽車感知能力擴展到1公里左右,大大提高了高速自動駕駛的安全性。經過短短一天的試乘體驗,簡單地總結一下,僅靠車輛智能化是不可能完全實現L4級自動駕駛的,而是將車輛和道路結合起來共享和傳輸數據,從而實現以CIDI為主導的車路協同研發理念,這就很容易實現車輛的自動駕駛。今天的車路協同是智能化、數字化和互聯的車輛、道路和交通環境的融合。在物聯網的發展趨勢下,這也是自動駕駛和未來流量將達到的場景。CIDI依靠多傳感器融合、深度學習、自主決策、高效計算、高精度定位以及V2V和V2X車聯網,實現車路協同下的自動駕駛。在現實中,自動駕駛的應用意義深遠,但車輛和道路的協同自動駕駛還需要更多的經驗和探索。
標簽:理念
日前,《日本經濟新聞》的報道中稱,從各自動駕駛企業提交給美國加利福尼亞州的報告可以看出,在自動駕駛的技術開發競爭中,谷歌旗下的Waymo一路領跑,
1900/1/1 0:00:00于特斯拉史無前例的大降價,剛提車的中國車主大喊維權,降價幅度在1133411萬元之間,提車不到十天車輛貶值了二三十萬,讓他們十分憋屈,也非常憤怒。
1900/1/1 0:00:00如果現在有人問你汽車行業的“新造車勢力”企業有誰?稍微關注點車市的人可能會不假思索的告訴你蔚來、小鵬、威馬、前途或者車和家等。
1900/1/1 0:00:002018年的中國車市表現著實讓人捉急,連續28年的銷量同比增長戛然而止。有專家預測,2018年的寒冬或許只是一個開始,真正的更慘的下滑還在后面。
1900/1/1 0:00:003月4日,以汽車之家為首的各大媒體曾聯合發布“電動車不宣傳等速續航“的倡議。
1900/1/1 0:00:002019年3月11日,主題為“AconnectedHongKongPoweredby5GampIoT”的論壇在香港科學園內成功舉辦。
1900/1/1 0:00:00