如今,泊車雷達不再是高不可攀的高端配置,幾乎所有價位的車型都會配備,但雷達探頭的數量有所不同。無論是新手還是老司機,停車雷達的出現大大降低了停車的難度,同時也可以減少盲點造成的小摩擦。雖然停車雷達探頭并不起眼,但這項技術可以在民用汽車上推廣,這也是由于軍事技術的發展。

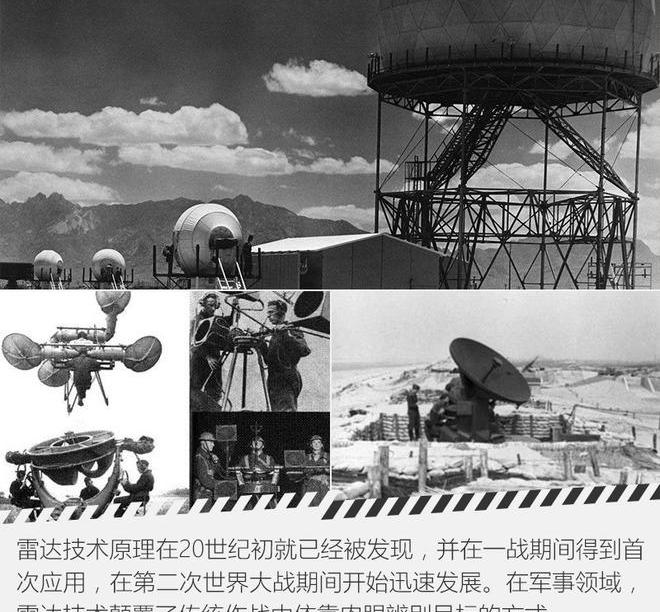
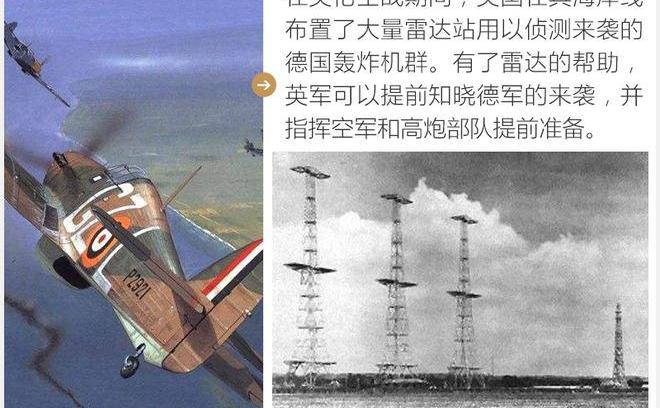
除了我們熟悉的倒車雷達探頭之外,雷達技術在汽車上的應用實際上遠比我們想象的要廣泛。例如,一些車型配備的ACC自適應巡航系統也需要雷達傳感器的幫助。進一步延伸,各大廠商現在推崇的自動駕駛技術也離不開雷達傳感器的支持。當然,根據不同的工作模式,車載雷達傳感器有很多分類。在介紹之前,讓我們先了解一下雷達技術的起源。“偷窺”起源于第二次世界大戰期間。在20世紀30年代和40年代,由于二戰參與國大規模使用飛機、大炮和其他武器,雷達技術也得到了迅速發展。英國率先將雷達投入實戰,對德國轟炸機群進行預警和探測。后來,機載雷達和火炮雷達相繼出現。
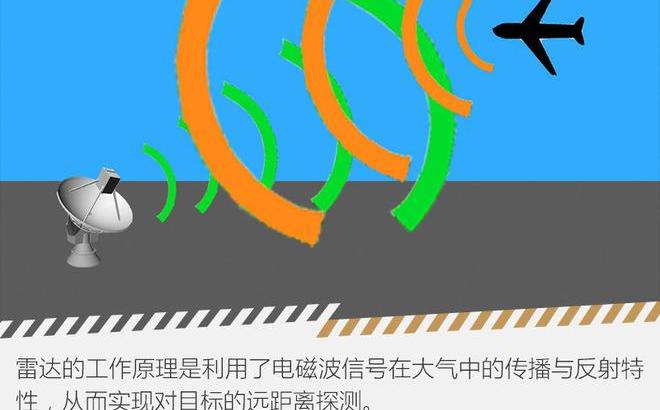
作為一種探測方法,對雷達技術的簡單理解是,電磁波通過發射器發射到特定區域,當電磁波遇到物體(被探測的目標)時,它會被散射,部分電磁波會被反射回來,然后被接收器捕獲。由于電磁波發射器的位置和電磁波的傳播速度是已知的,因此僅通過計算返回信號的時間差就可以獲得檢測到的目標的方位角、距離和高度等信息。
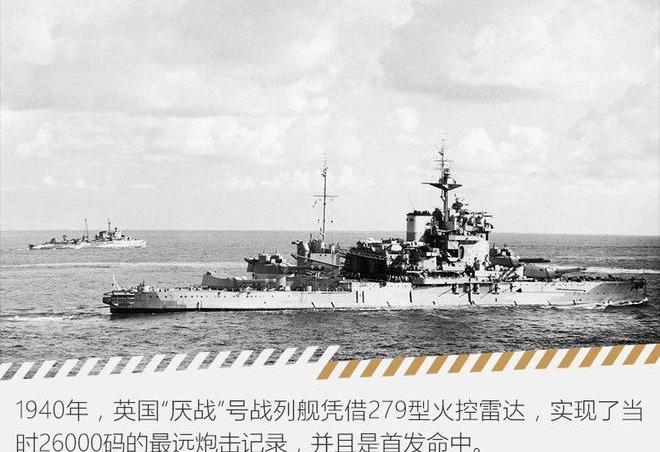
與傳統的光學探測(肉眼、望遠鏡、探照燈等)相比,雷達的探測距離更長,電磁波在大氣中的穿透力較強,不受天氣、光照條件等客觀因素的限制。這一特點深受軍事領域的歡迎,因此雷達技術在第二次世界大戰中后期得到了廣泛應用并不斷發展。以下是第二次世界大戰期間雷達技術應用的幾個例子:

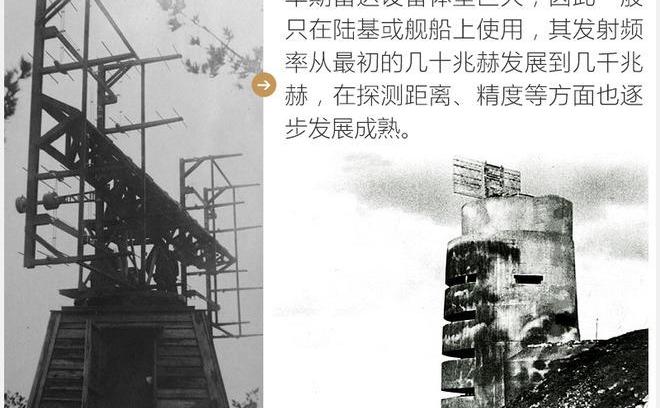
在戰爭后期,隨著成像技術的出現,雷達的探測效率和精度得到了進一步的發展。同時,雷達設備的小型化使其能夠安裝在飛機和其他設備上,其應用范圍進一步擴大。經過戰爭的洗禮,雷達技術在戰后迅速發展,成為現代軍事裝備不可或缺的一部分。當然,除了軍事領域,雷達技術在民用領域也發揮著重要作用,如天氣雷達、雷達導航系統和測速雷達,當然也包括在汽車領域的應用。普通的汽車雷達技術呢?隨著雷達技術的不斷發展和成熟,有超聲波雷達、毫米波雷達和激光雷達等不同的分類,但它們的主要工作原理是利用信號發射和反射現象來探測周圍物體。在汽車領域,目前已經應用的車載雷達技術包括超聲波雷達、紅外雷達、毫米波雷達和激光雷達,它們自身的特點不同,因此應用場景也不同。

超聲波雷達(輔助駐車傳感器/倒車雷達)超聲波雷達……
s主要用于駐車雷達傳感器,已成為大多數車輛必備的實用配置之一。超聲波雷達根據用途的不同分為UPA和APA。前者是我們停車時經常使用的障礙物檢測傳感器,它經常被布置在前后保險杠上。后者主要用于自動泊車和并線輔助,一般布置在車輛側面的輪眉處。
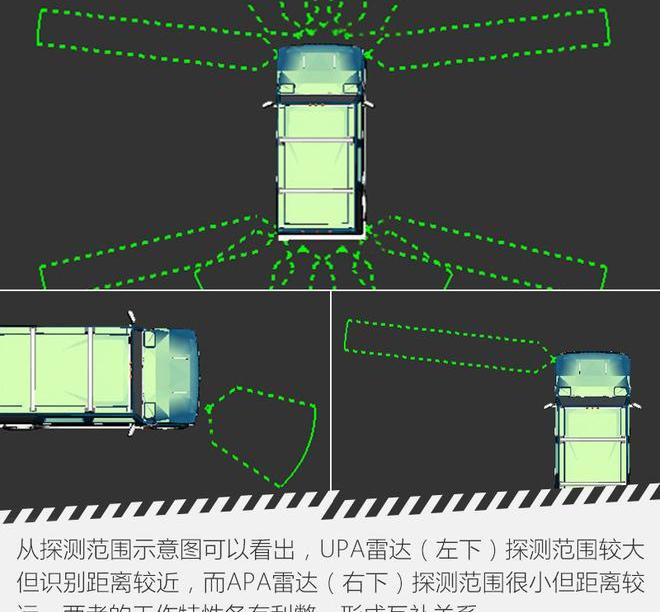
超聲波雷達雖然成本低、體積小,但探測距離相對較近,超聲波在不同濕度和溫度環境下的響應速度變化較大,不適合高速探測。此外,超聲波雷達傳感器只能識別障礙物的大致位置,無法實現更精確的測量,這也是超聲波雷達目前無法用于自動駕駛的主要原因。紅外雷達傳感器(夜視輔助系統)在自動駕駛技術普及之前,一些高端車型使用紅外雷達傳感器來幫助提高駕駛員對前方障礙物的感知,即車載夜視系統。根據工作原理的不同,紅外雷達傳感器分為主動型和被動型。其中,主動紅外雷達配備了紅外發射源和接收裝置,可以在夜間低光環境下發現遠處的道路障礙物。被動紅外雷達僅依靠一套紅外接收器來分析外部物體反射的紅外信號源,識別精度和距離相對較差。
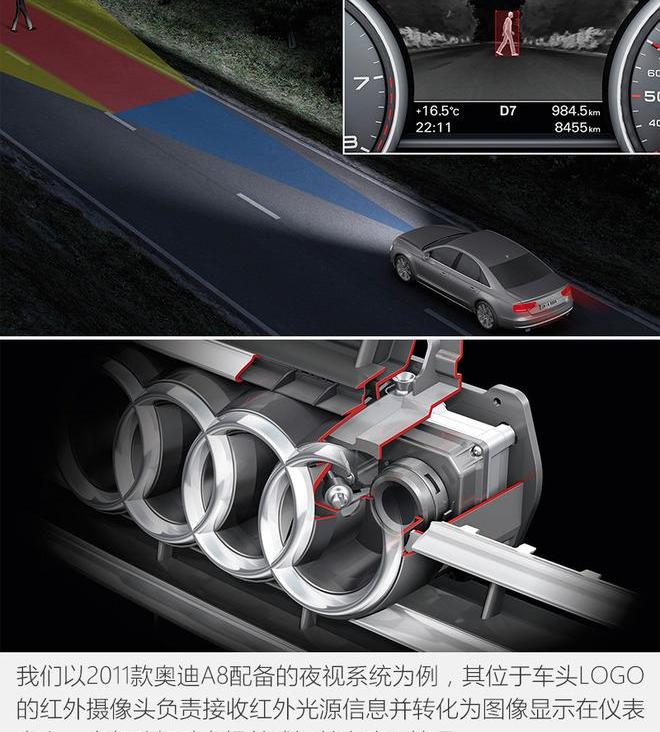
雖然紅外雷達傳感器在昏暗的環境中有很多優點,但由于其對紅外信號的依賴性,在白天和陽光下很容易受到外部紅外光源的干擾,因此不具備全天候工作能力。此外,紅外雷達傳感器的有效探測距離相對較近,不能完全滿足自動駕駛技術的要求。毫米波雷達(ACC自適應巡航)在停車雷達和紅外雷達等“入門技術”的鋪墊下,民用汽車越來越容易駕駛。接下來,汽車工程師開始讓汽車變得更智能,減輕司機的負擔。在這樣的需求背景下,毫米波雷達開始出現在汽車中,并幫助我們實現了ACC自適應巡航等駕駛輔助功能。
0
目前,車載毫米波雷達主要為77G規格,其電磁波長約為4mm,主要用于中遠程測距和探測。眾所周知,空氣中灰塵顆粒和雨水的大小通常小于4毫米,因此毫米波雷達在工作時不會受到這些外部因素的干擾,可以實現全天候工作能力。
1
與上面介紹的超聲波雷達相比,毫米波雷達不僅可以檢測障礙物的例子,還可以大致識別物體的輪廓。簡而言之,毫米波雷達可以識別障礙物是人還是車,因此其檢測精度更高,可以實現更復雜的輔助功能,如自動跟車和自動制動。
2
當然,毫米波雷達也有其自身的局限性。由于電磁波在遇到障礙物后會散射,如果兩個障礙物很近,毫米波雷達就會“看起來”成為一個巨大的障礙物。即便如此,毫米波雷達技術在未來仍有很大的發展潛力,在自動駕駛技術中發揮著非常重要的基礎作用。雷達技術和自動駕駛的未來如上所述,雷達技術在汽車領域發揮著越來越重要的作用。現在是時候展望雷達和汽車技術的未來發展了。在毫米波雷達的幫助下,我們的汽車已經能夠實現有限的“自動駕駛”功能,如自適應巡航、車道保持和自動制動。然而,這些都屬于駕駛輔助的范疇,與r…還有很大差距……
l自動駕駛。
3
為了進一步提高車輛感知周圍事物的能力,工程師們引入了更先進(昂貴)的激光雷達設備。與毫米波雷達相比,激光掃描在探測精度上更為出色,甚至可以清晰地勾勒出周圍景物的詳細輪廓。目前,許多科技公司都在使用激光雷達測試無人車,甚至有人認為激光雷達是實現自動駕駛的必要技術之一。
4
就像所有新興事物一樣,激光雷達在現階段也有其自身的缺點,因此無法大規模商業化。主要原因如下:
5
6
7
受各種主客觀因素的限制,激光雷達仍然是一種實驗技術。然而,在高精度探測能力的誘惑下,許多制造商仍致力于開發激光雷達自動駕駛技術。全文摘要
8
車載雷達技術作為汽車感知周圍事件的重要基礎,不僅使我們的汽車生活更加便利,而且對自動駕駛的發展起到了基礎作用。如今,泊車雷達不再是高不可攀的高端配置,幾乎所有價位的車型都會配備,但雷達探頭的數量有所不同。無論是新手還是老司機,停車雷達的出現大大降低了停車的難度,同時也可以減少盲點造成的小摩擦。雖然停車雷達探頭并不起眼,但這項技術可以在民用汽車上推廣,這也是由于軍事技術的發展。
除了我們熟悉的倒車雷達探頭之外,雷達技術在汽車上的應用實際上遠比我們想象的要廣泛。例如,一些車型配備的ACC自適應巡航系統也需要雷達傳感器的幫助。進一步延伸,各大廠商現在推崇的自動駕駛技術也離不開雷達傳感器的支持。當然,根據不同的工作模式,車載雷達傳感器有很多分類。在介紹之前,讓我們先了解一下雷達技術的起源。“偷窺”起源于第二次世界大戰期間。在20世紀30年代和40年代,由于二戰參與國大規模使用飛機、大炮和其他武器,雷達技術也得到了迅速發展。英國率先將雷達投入實戰,對德國轟炸機群進行預警和探測。后來,機載雷達和火炮雷達相繼出現。
作為一種探測方法,對雷達技術的簡單理解是,電磁波通過發射器發射到特定區域,當電磁波遇到物體(被探測的目標)時,它會被散射,部分電磁波會被反射回來,然后被接收器捕獲。由于電磁波發射器的位置和電磁波的傳播速度是已知的,因此僅通過計算返回信號的時間差就可以獲得檢測到的目標的方位角、距離和高度等信息。
與傳統的光學探測(肉眼、望遠鏡、探照燈等)相比,雷達的探測距離更長,電磁波在大氣中的穿透力較強,不受天氣、光照條件等客觀因素的限制。這一特點深受軍事領域的歡迎,因此雷達技術在第二次世界大戰中后期得到了廣泛應用并不斷發展。以下是世界上雷達技術應用的幾個例子……
第二部分:
在戰爭后期,隨著成像技術的出現,雷達的探測效率和精度得到了進一步的發展。同時,雷達設備的小型化使其能夠安裝在飛機和其他設備上,其應用范圍進一步擴大。經過戰爭的洗禮,雷達技術在戰后迅速發展,成為現代軍事裝備不可或缺的一部分。當然,除了軍事領域,雷達技術在民用領域也發揮著重要作用,如天氣雷達、雷達導航系統和測速雷達,當然也包括在汽車領域的應用。普通的汽車雷達技術呢?隨著雷達技術的不斷發展和成熟,有超聲波雷達、毫米波雷達和激光雷達等不同的分類,但它們的主要工作原理是利用信號發射和反射現象來探測周圍物體。在汽車領域,目前已經應用的車載雷達技術包括超聲波雷達、紅外雷達、毫米波雷達和激光雷達,它們自身的特點不同,因此應用場景也不同。
超聲波雷達(輔助駐車傳感器/倒車雷達)超聲波雷達主要用于駐車雷達傳感器,已成為大多數車輛必備的實用配置之一。超聲波雷達根據用途的不同分為UPA和APA。前者是我們停車時經常使用的障礙物檢測傳感器,它經常被布置在前后保險杠上。后者主要用于自動泊車和并線輔助,一般布置在車輛側面的輪眉處。
超聲波雷達雖然成本低、體積小,但探測距離相對較近,超聲波在不同濕度和溫度環境下的響應速度變化較大,不適合高速探測。此外,超聲波雷達傳感器只能識別障礙物的大致位置,無法實現更精確的測量,這也是超聲波雷達目前無法用于自動駕駛的主要原因。紅外雷達傳感器(夜視輔助系統)在自動駕駛技術普及之前,一些高端車型使用紅外雷達傳感器來幫助提高駕駛員對前方障礙物的感知,即車載夜視系統。根據工作原理的不同,紅外雷達傳感器分為主動型和被動型。其中,主動紅外雷達配備了紅外發射源和接收裝置,可以在夜間低光環境下發現遠處的道路障礙物。被動紅外雷達僅依靠一套紅外接收器來分析外部物體反射的紅外信號源,識別精度和距離相對較差。
雖然紅外雷達傳感器在昏暗的環境中有很多優點,但由于其對紅外信號的依賴性,在白天和陽光下很容易受到外部紅外光源的干擾,因此不具備全天候工作能力。此外,紅外雷達傳感器的有效探測距離相對較近,不能完全滿足自動駕駛技術的要求。毫米波雷達(ACC自適應巡航)在停車雷達和紅外雷達等“入門技術”的鋪墊下,民用汽車越來越容易駕駛。接下來,汽車工程師開始讓汽車變得更智能,減輕司機的負擔。在這樣的需求背景下,毫米波雷達開始出現在汽車中,并幫助我們實現了ACC自適應巡航等駕駛輔助功能。
0
目前,車載毫米波雷達主要為77G規格,其電磁波長約為4mm,主要用于測距和探測……
在中距離和長距離上。眾所周知,空氣中灰塵顆粒和雨水的大小通常小于4毫米,因此毫米波雷達在工作時不會受到這些外部因素的干擾,可以實現全天候工作能力。
1
與上面介紹的超聲波雷達相比,毫米波雷達不僅可以檢測障礙物的例子,還可以大致識別物體的輪廓。簡而言之,毫米波雷達可以識別障礙物是人還是車,因此其檢測精度更高,可以實現更復雜的輔助功能,如自動跟車和自動制動。
2
當然,毫米波雷達也有其自身的局限性。由于電磁波在遇到障礙物后會散射,如果兩個障礙物很近,毫米波雷達就會“看起來”成為一個巨大的障礙物。即便如此,毫米波雷達技術在未來仍有很大的發展潛力,在自動駕駛技術中發揮著非常重要的基礎作用。雷達技術和自動駕駛的未來如上所述,雷達技術在汽車領域發揮著越來越重要的作用。現在是時候展望雷達和汽車技術的未來發展了。在毫米波雷達的幫助下,我們的汽車已經能夠實現有限的“自動駕駛”功能,如自適應巡航、車道保持和自動制動。然而,這些都屬于駕駛輔助的范疇,與真正的自動駕駛還有很大差距。
3
為了進一步提高車輛感知周圍事物的能力,工程師們引入了更先進(昂貴)的激光雷達設備。與毫米波雷達相比,激光掃描在探測精度上更為出色,甚至可以清晰地勾勒出周圍景物的詳細輪廓。目前,許多科技公司都在使用激光雷達測試無人車,甚至有人認為激光雷達是實現自動駕駛的必要技術之一。
4
就像所有新興事物一樣,激光雷達在現階段也有其自身的缺點,因此無法大規模商業化。主要原因如下:
5
6
7
受各種主客觀因素的限制,激光雷達仍然是一種實驗技術。然而,在高精度探測能力的誘惑下,許多制造商仍致力于開發激光雷達自動駕駛技術。全文摘要
8
車載雷達技術作為汽車感知周圍事件的重要基礎,不僅使我們的汽車生活更加便利,而且對自動駕駛的發展起到了基礎作用。
隨著車市跌宕起伏,上市車企的利潤分化愈加明顯。
1900/1/1 0:00:00今年5月,空姐順風車遇害事件后,滴滴對順風車業務進行了整改,結果僅僅3個月,又發生了樂清順風車事件。作為共享經濟碩果僅存的跟共享多少還沾點邊的一項業務,順風車的前景也因此變得一片黯淡。
1900/1/1 0:00:00據澳媒報道,近日,有關無人駕駛公交車的研究與試驗有了新突破。澳大利亞拉籌伯大學LaTrobeUniversity在其校園開展了為期12個月的無人駕駛公交車試運營。
1900/1/1 0:00:00《中華人民共和國車輛購置稅法(草案)》27日提請全國人大常委會審議,維持10稅率不變。
1900/1/1 0:00:00和10年前相比,現在已經很少有人用“汽車瘋子”來形容李書福了。這并非因為他不如以前那般“瘋狂”,而是因為,很多之前被認為瘋狂的說法和做法,最后都變成了現實。
1900/1/1 0:00:00特斯拉首席執行官埃隆馬斯克日前表態取消私有化(退市)計劃,業界人士警告稱,特斯拉可能因此面臨更多監管調查和市場考驗。
1900/1/1 0:00:00