剛剛成立達摩院的阿里巴巴,也將進軍無人領域?1月14日,記者發現,阿里巴巴首次出現在KITTI道路場景分割榜單上,這是全球最大的一套自動駕駛計算機視覺算法。榜單顯示,阿里的人工智能團隊iDST贏得了三個細分任務中的第一個,包括兩個特定場景任務UU_ROAD(鄉村車道)和UMM_ROAD(多車道),以及整個場景的綜合評估任務URBAN_ROAD。阿里巴巴向《澎湃新聞》證實了這一消息,但否認阿里將進軍自動駕駛業務。阿里表示,公司重視基礎科學研究,自動駕駛技術是其中的一部分。這項研究由阿里巴巴的機器視覺科學家任曉峰領導。據了解,KITTI數據集是自動駕駛技術研發的必要平臺,圖森、馭勢、三星、NEC等公司都出現在排行榜上。資料顯示,KITTI數據集由德國卡爾斯魯厄理工學院和豐田美國理工學院聯合創建,是國際公認的最大的自動駕駛計算機算法評估數據集。KITTI數據集涵蓋了五個場景,如城市、住宅區、道路、校園和行人。采用了更適合自動駕駛的BEV(鳥瞰圖),包括許多難度很大的無標記道路。據KITTI官網介紹,該評估數據集主要分為場景分割、目標檢測、目標跟蹤等類別。一位研究人員告訴The Paper,道路場景分割在自動駕駛領域非常重要,主要用于可駕駛區域的劃分、自動駕駛路徑規劃、高精度地圖構建和AR(增強現實)導航。
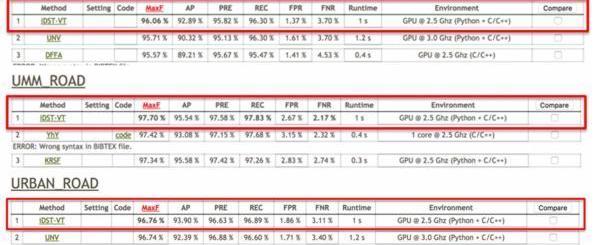
阿里贏得三項細分任務第一來源:KITTI官網截圖大多數自動駕駛研究機構可以對城市道路進行大區塊的細分,但識別邊緣道路仍然非常困難,比如路邊停放的石頭和車輛。如何對道路邊緣進行更精細的分割是目前道路場景分割的主要方向。根據阿里巴巴的一份聲明,由任曉峰領導的阿里iDST視覺技術團隊提出了一種基于在線難樣本挖掘的網絡學習方法,同時增加了在線數據增強模塊和全局特征與局部特征融合機制,以提高網絡特征的表示能力和推廣能力,以解決道路邊緣和車輛周圍道路分割不準確以及道路分割中陰影干擾的問題。經過半年的研究,阿里分別以96.06%和97.70%的分割準確率獲得了UU_ROAD(鄉村車道)和UMM_ROAD(多車道)的第一名,并以96.76%的準確率獲得道路場景分割綜合評估任務URBAN_ROAD的第一名。這也是阿里巴巴首次出現在KITTI道路場景細分的名單上。2017年6月,The Paper率先報道了亞馬遜排名最高的中國科學家任曉峰加入阿里iDST團隊的消息。任曉峰曾領導亞馬遜亞馬遜Go無人商店算法。當他加入阿里時,他在圖像領域的專家中被稱贊為非常罕見:“在計算機視覺領域,圖像分類、物體識別、跟蹤、檢測和事件檢測都有全面深入的了解。”澎湃新聞記者還發現,在KITTI數據集的其他幾項中也可以看到阿里巴巴iDST,包括車輛檢測,行人檢測和行人重新識別。據介紹,這部分技術已經落地阿里云ET城市大腦場景,目前主要用于城市交通管理。阿里巴巴的科研能力正在上升,它強調對基礎科學的研究投資。在2017年杭州云棲大會上,阿里宣布成立探索人類科技未來的實驗室“達摩院”,并計劃在三年內投資1000多億元用于新技術,用于涵蓋基礎科學和顛覆性技術創新的研究。阿里巴巴董事會主席馬云希望將“達摩院”視為阿里巴巴留給世界的最好的東西之一。剛剛成立達摩院的阿里巴巴,也將進軍無人領域?開……
14日,記者發現,阿里巴巴首次出現在KITTI道路場景分割列表上,這是世界上最大的一套自動駕駛計算機視覺算法。榜單顯示,阿里的人工智能團隊iDST贏得了三個細分任務中的第一個,包括兩個特定場景任務UU_ROAD(鄉村車道)和UMM_ROAD(多車道),以及整個場景的綜合評估任務URBAN_ROAD。阿里巴巴向《澎湃新聞》證實了這一消息,但否認阿里將進軍自動駕駛業務。阿里表示,公司重視基礎科學研究,自動駕駛技術是其中的一部分。這項研究由阿里巴巴的機器視覺科學家任曉峰領導。據了解,KITTI數據集是自動駕駛技術研發的必要平臺,圖森、馭勢、三星、NEC等公司都出現在排行榜上。資料顯示,KITTI數據集由德國卡爾斯魯厄理工學院和豐田美國理工學院聯合創建,是國際公認的最大的自動駕駛計算機算法評估數據集。KITTI數據集涵蓋了五個場景,如城市、住宅區、道路、校園和行人。采用了更適合自動駕駛的BEV(鳥瞰圖),包括許多難度很大的無標記道路。據KITTI官網介紹,該評估數據集主要分為場景分割、目標檢測、目標跟蹤等類別。一位研究人員告訴The Paper,道路場景分割在自動駕駛領域非常重要,主要用于可駕駛區域的劃分、自動駕駛路徑規劃、高精度地圖構建和AR(增強現實)導航。
阿里贏得三項細分任務第一來源:KITTI官網截圖大多數自動駕駛研究機構可以對城市道路進行大區塊的細分,但識別邊緣道路仍然非常困難,比如路邊停放的石頭和車輛。如何對道路邊緣進行更精細的分割是目前道路場景分割的主要方向。根據阿里巴巴的一份聲明,由任曉峰領導的阿里iDST視覺技術團隊提出了一種基于在線難樣本挖掘的網絡學習方法,同時增加了在線數據增強模塊和全局特征與局部特征融合機制,以提高網絡特征的表示能力和推廣能力,以解決道路邊緣和車輛周圍道路分割不準確以及道路分割中陰影干擾的問題。經過半年的研究,阿里分別以96.06%和97.70%的分割準確率獲得了UU_ROAD(鄉村車道)和UMM_ROAD(多車道)的第一名,并以96.76%的準確率獲得道路場景分割綜合評估任務URBAN_ROAD的第一名。這也是阿里巴巴首次出現在KITTI道路場景細分的名單上。2017年6月,The Paper率先報道了亞馬遜排名最高的中國科學家任曉峰加入阿里iDST團隊的消息。任曉峰曾領導亞馬遜亞馬遜Go無人商店算法。當他加入阿里時,他在圖像領域的專家中被稱贊為非常罕見:“在計算機視覺領域,圖像分類、物體識別、跟蹤、檢測和事件檢測都有全面深入的了解。”澎湃新聞記者還發現,在KITTI數據集的其他幾項中也可以看到阿里巴巴iDST,包括車輛檢測,行人檢測和行人重新識別。據介紹,這部分技術已經落地阿里云ET城市大腦場景,目前主要用于城市交通管理。阿里巴巴的科研能力正在上升,它強調對基礎科學的研究投資。在2017年杭州云棲大會上,阿里宣布成立探索人類科技未來的實驗室“達摩院”,并計劃在三年內投資1000多億元用于新技術,用于涵蓋基礎科學和顛覆性技術創新的研究。阿里巴巴董事會主席馬云希望將“達摩院”視為阿里巴巴留給世界的最好的東西之一。
據路透社北京時間1月15日報道,當地時間星期日,美國交通部部長趙小蘭(ElaineChao)表示,特朗普政府計劃今年夏季頒布修訂后的自動駕駛汽車指導方針。
1900/1/1 0:00:00以實現完全自動駕駛為目標,通用汽車在近些年的發展中通過收購、合作等方式不斷加強集團自動駕駛技術儲備。
1900/1/1 0:00:00據美國媒體1月11日報道,日產曾與美國國家航空航天局NASA合作,針對自動駕駛共同開發SAM無縫自動出行技術平臺,目前日產與NASA達成協議,擴大了這一合作項目。
1900/1/1 0:00:00提起采埃孚,絕大多數汽車愛好者都會想起他們的變速箱。8AT、9AT等產品可謂是在業內家喻戶曉。
1900/1/1 0:00:00繼2016年突破千萬輛后,2017年我國汽車召回數量繼續增長,同比增幅達77,并連續4年刷新年度召回數量紀錄。
1900/1/1 0:00:00Google母公司Alphabet旗下自動駕駛汽車部門Waymo的原型車,最近又被外媒曝光正在舊金山的公共道路上展開測試。
1900/1/1 0:00:00