
(圖片來源:asahicom.jp)據外媒報道,在老年司機決定換一輛配備安全功能的汽車或上交駕照之前,汽車賽車手塔庫馬·阿桔希望老年司機能先坐上駕駛模擬器進行模擬。42歲的阿桔開發了一種基于虛擬現實技術的駕駛模擬器,讓老年人和其他司機體驗最新的安全支持系統,如自動剎車功能。駕駛員可以坐在模擬駕駛位置,戴上VR眼鏡。根據駕駛員的動作,座椅可以左右、前后、上下移動;而且VR眼鏡會根據駕駛員眼睛的運動來顯示車內車外的場景,讓駕駛員感覺自己開的是一輛真車。這款仿真車配備了先進的安全功能,如防止駕駛員誤踩油門突然加速,車輛距離汽車太近時自動剎車等。例如,在便利店前的停車場,如果司機“誤”踩油門,讓車開過停車位,模擬車輛就會猛烈搖晃司機,讓車輛停下來并報警。不過有可能車再動的時候還是會撞到便利店,因為模擬車的設計和一些配備安全支持系統的車輛是一樣的。只有在自動制動功能啟動后的兩秒鐘內,駕駛員成功踩下制動踏板,安全支持系統才會啟動。阿桔是一名積極參加納斯卡的賽車手,這場比賽中的賽車與市場上的賽車相似。2016年,阿桔開發了一個練習賽車的模擬器,并根據賽車手和其他喜歡玩駕駛電子游戲的人的要求制作了模擬器。在看了許多致命交通事故的新聞報道(尤其是與老年司機有關的報道)后,阿桔說:“將我的模擬器與虛擬現實技術結合起來,可以忠實地再現司機看到的物體與車輛之間的距離,有助于防止交通事故。”
(圖片來源:asahicom.jp)據外媒報道,在老年司機決定換一輛配備安全功能的汽車或上交駕照之前,汽車賽車手塔庫馬·阿桔希望老年司機能先坐上駕駛模擬器進行模擬。42歲的阿桔開發了一種基于虛擬現實技術的駕駛模擬器,讓老年人和其他司機體驗最新的安全支持系統,如自動剎車功能。駕駛員可以坐在模擬駕駛位置,戴上VR眼鏡。根據駕駛員的動作,座椅可以左右、前后、上下移動;而且VR眼鏡會根據駕駛員眼睛的運動來顯示車內車外的場景,讓駕駛員感覺自己開的是一輛真車。這款仿真車配備了先進的安全功能,如防止駕駛員誤踩油門突然加速,車輛距離汽車太近時自動剎車等。例如,在便利店前的停車場,如果司機“誤”踩油門,讓車開過停車位,模擬車輛就會猛烈搖晃司機,讓車輛停下來并報警。不過有可能車再動的時候還是會撞到便利店,因為模擬車的設計和一些配備安全支持系統的車輛是一樣的。只有在自動制動功能啟動后的兩秒鐘內,駕駛員成功踩下制動踏板,安全支持系統才會啟動。阿桔是一名積極參加納斯卡的賽車手,這場比賽中的賽車與市場上的賽車相似。2016年,阿桔開發了一個練習賽車的模擬器,并根據賽車手和其他喜歡玩駕駛電子游戲的人的要求制作了模擬器。在看了許多致命交通事故的新聞報道(尤其是與老年司機有關的報道)后,阿桔說:“將我的模擬器與虛擬現實技術結合起來,可以忠實地再現司機看到的物體與車輛之間的距離,有助于防止交通事故。”一般來說,姿態圖的優化目標是將整個圖離散成點,然后建立一些邊約束,最后通過優化一些點的位置來滿足邊約束。姿態映射也變成了一個優化問題。姿態圖的挑戰姿態圖的整體數學模型看似簡單,但有很多細節需要優化:◆如何選擇頂點。比如要考慮是不是毫秒的點都要加,GPS信號不好的點要不要加。◆如何保證邊緣的準確性?如何建立一個頂點與另一個頂點的相對位置?◆如何求解非線性優化?圖建好之后如何做非線性優化?◆如何評價優化效果?圖表是否與真實環境一致,如何評價結果滿足要求。◆效率和資源。對于工程來說,數據量如此之大,你需要考慮如何設計工程算法來保證效率和資源。比如考慮是否需要定制和優化算法,如何使用GPU或者分布式計算方法。
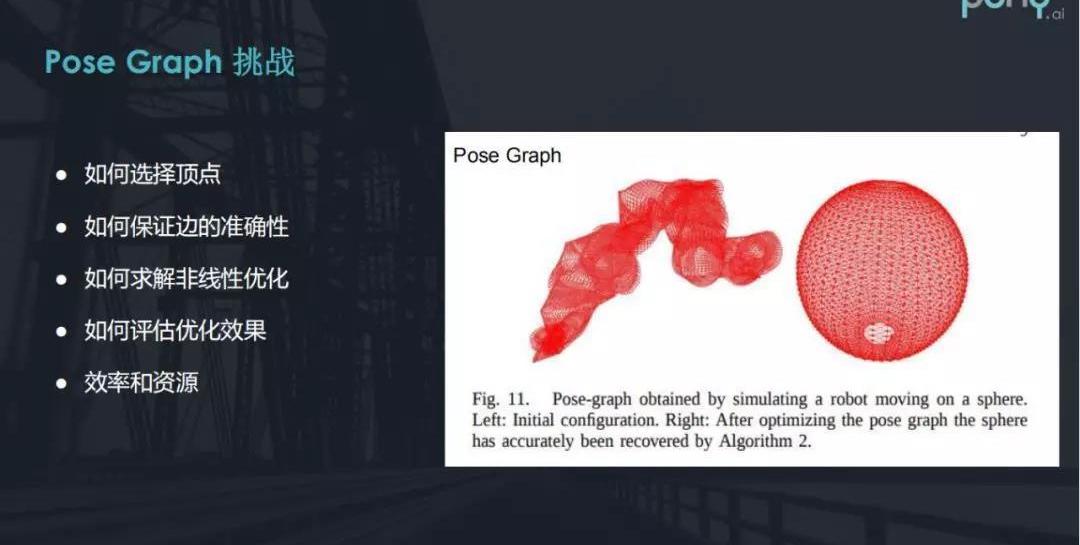
我想通過上圖右邊的例子解釋一下姿勢圖——左邊的原圖是一個物體在一個球體上來回移動和旋轉。通過建立邊與邊之間的相對約束,優化后,你會發現整個環境被重構為右邊一個理想的、完整的球體。總之,我們的工作就是把左圖變成右圖。迭代最近點算法:保證邊緣的約束我們前面提到,姿態圖需要保證邊緣的約束。為了計算這個約束,業界使用的傳統經典算法叫做ICP(迭代最近點算法)。
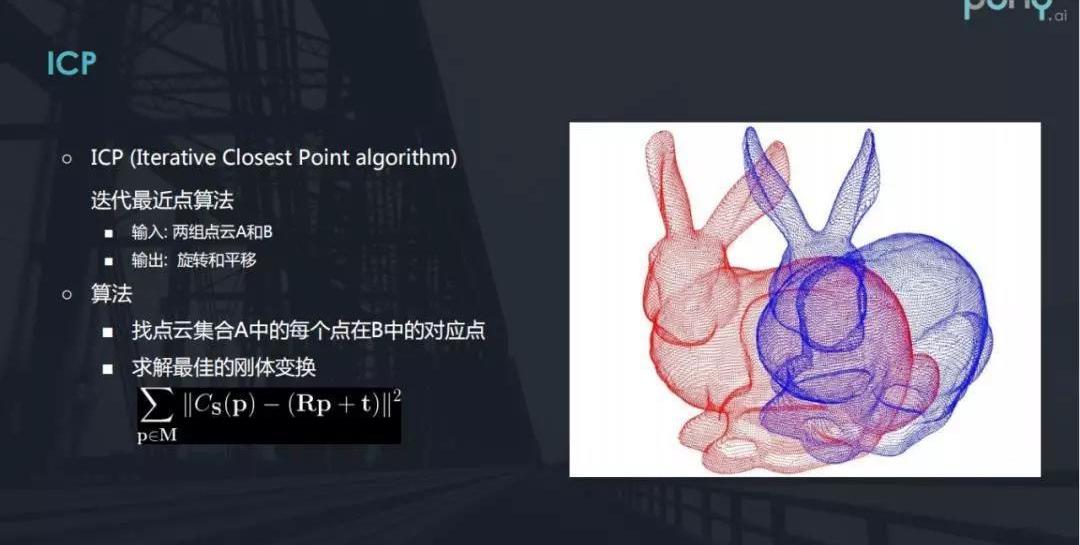
比如左邊有一只紅色的兔子,右邊有一只藍色的兔子。現實中兩只兔子的位置是一樣的,但是在圖中兩只兔子的位置不一樣,說明有偏差。也就是說,輸入是A、B兩組點云,輸出是兩組點云之間在空間上的旋轉和平移。具體算法的思路大致是:在集合B中尋找點云集合A中每個點的對應點,通過求解最佳剛體變換和迭代優化,最終得到一個收斂解。迎接挑戰:消除非靜態障礙
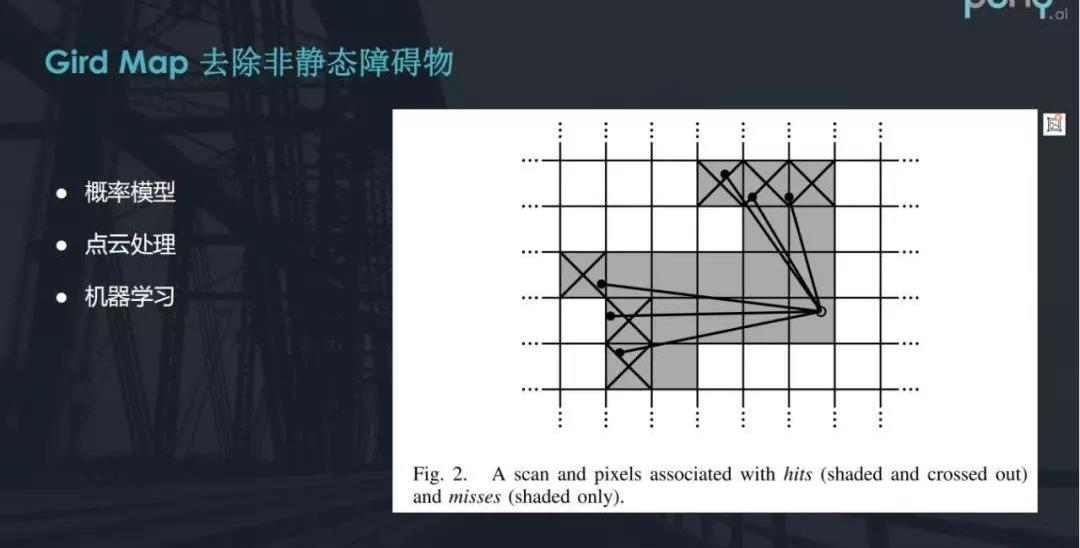
去除非靜態障礙物的方法有三種:◆概率模型去除。◆點云處理,簡單的概率模型是不夠的,比如有時候小區路邊經常停著車,有時候開走了車。……en數據采集完畢,汽車只是停在路邊,然后就需要依靠線下點云處理。◆機器學習,即利用機器學習算法從地圖中挖掘出非靜態的物體。

上圖是去除非靜態障礙物前后的簡單對比。在處理之前,你會發現在正確的道路上有一些汽車輪廓。當從太空中移除時,地圖變得清晰得多。03如何定位自動駕駛定位的自動駕駛車輛特點對于定位系統和傳統定位來說,自動駕駛車輛的位置和姿態具有以下特點:◆厘米級的精度需要精確到車輛在車道線內的具體位置,比如距離左右邊緣線幾厘米。◆高頻低延時,要求毫秒級延時,實時傳輸車輛位置,否則會發生安全事故。幾種定位方式的全球導航衛星系統特點:米級精度,低頻干擾或遮擋解決方案:RTK(實時運動學)載波相位差技術,可達厘米級。相對定位:IMU特點:加速度計和陀螺儀在加速度和角速度三個方向的高頻(一般為100HZ)累積誤差。解決方案:慣性導航系統的點云定位是魯棒的,不依賴于GPS信息。根據先前的地圖,地圖的準確性和實時性可能會導致定位誤差。需要解決:弱特征環境。比如在橋上,向前開10米和向后開10米看到的場景都差不多。對于這種環境,如何找到準確的位置是必須考慮的問題。定位系統的多傳感器融合一般來說,僅僅依靠單個傳感器進行定位是不夠的,所以采用多傳感器融合方案。基于卡爾曼濾波模型的整體定位效果將具有更高的精度和更好的魯棒性。卡爾曼濾波器模型卡爾曼濾波器是一種高效的遞歸濾波器,它可以從一系列不完全和有噪聲的測量值中估計出動態系統的狀態。
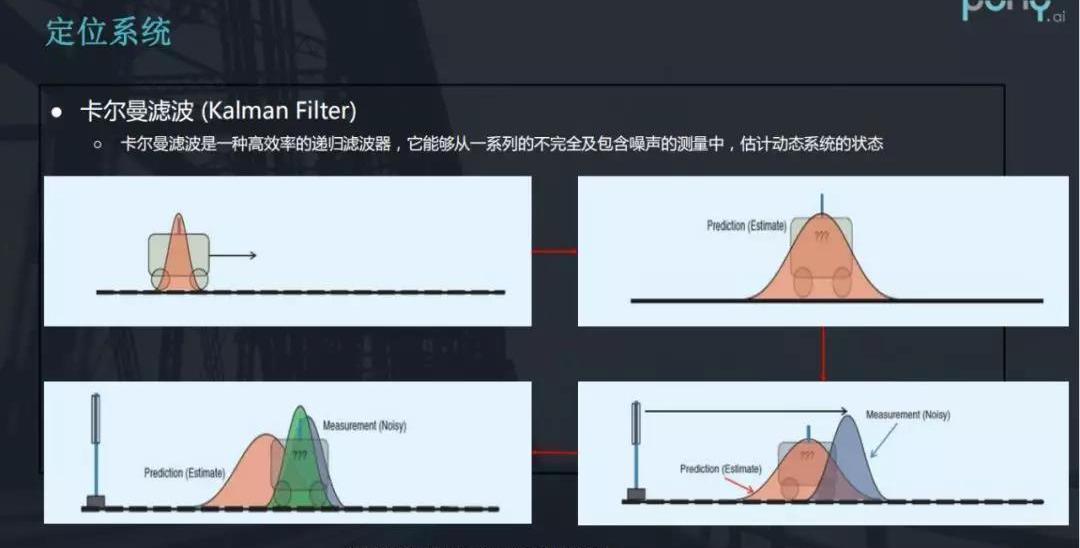
基于卡爾曼濾波模型,我們把自動駕駛車輛當時的位置看成是一個高斯分布,也就是說車輛位于某個區域內,最有可能在中間。隨著車輛行駛,定位系統可以根據運動方程預測車輛的位置。假設一輛車向前行駛了10米,那么這輛車就產生了一個預測位置。然而,在實際駕駛中,預測位置和實際位置之間的誤差逐漸變大。這是因為這個數據可能是IMU給的,IMU作為傳感器自然會有誤差。同時,假設車上裝有GPS,GPS給出的位置信息相當于上圖中的藍色部分,這個定位數據也包含一定的誤差。所以,我們得到了關于這輛車的兩個位置信息,通過組合它們,我們可以得到更準確和可信的結果。可以看到卡爾曼濾波器在不斷的更新迭代,最終達到獲得更精確位置的目的。

定位系統的最終目的是讓萬里無憂,而自動駕駛面臨的挑戰是更低的成本和更苛刻的外部環境。最終解決這些問題,實現這個目標。一般來說,姿態圖的優化目標是將整個圖離散成點,然后建立一些邊約束,最后通過優化一些點的位置來滿足邊約束。姿態映射也變成了一個優化問題。姿態圖的挑戰姿態圖的整體數學模型看似簡單,但有很多細節需要優化:◆如何選擇頂點。比如要考慮是不是毫秒的點都要加,GPS信號不好的點要不要加。◆如何保證邊緣的準確性?如何建立一個頂點與另一個頂點的相對位置?◆如何求解非線性優化?圖建好之后如何做非線性優化?◆如何評價優化效果?是否d……gram是否與真實環境一致以及如何評價結果是否符合要求。◆效率和資源。對于工程來說,數據量如此之大,你需要考慮如何設計工程算法來保證效率和資源。比如考慮是否需要定制和優化算法,如何使用GPU或者分布式計算方法。
我想通過上圖右邊的例子解釋一下姿勢圖——左邊的原圖是一個物體在一個球體上來回移動和旋轉。通過建立邊與邊之間的相對約束,優化后,你會發現整個環境被重構為右邊一個理想的、完整的球體。總之,我們的工作就是把左圖變成右圖。迭代最近點算法:保證邊緣的約束我們前面提到,姿態圖需要保證邊緣的約束。為了計算這個約束,業界使用的傳統經典算法叫做ICP(迭代最近點算法)。
比如左邊有一只紅色的兔子,右邊有一只藍色的兔子。現實中兩只兔子的位置是一樣的,但是在圖中兩只兔子的位置不一樣,說明有偏差。也就是說,輸入是A、B兩組點云,輸出是兩組點云之間在空間上的旋轉和平移。具體算法的思路大致是:在集合B中尋找點云集合A中每個點的對應點,通過求解最佳剛體變換和迭代優化,最終得到一個收斂解。迎接挑戰:消除非靜態障礙
去除非靜態障礙物的方法有三種:◆概率模型去除。◆點云處理,簡單的概率模型是不夠的,比如有時候小區路邊經常停著車,有時候開走了車。數據采集的時候,車只是停在路邊,然后就需要依靠線下的點云處理。◆機器學習,即利用機器學習算法從地圖中挖掘出非靜態的物體。
上圖是去除非靜態障礙物前后的簡單對比。在處理之前,你會發現在正確的道路上有一些汽車輪廓。當從太空中移除時,地圖變得清晰得多。03如何定位自動駕駛定位的自動駕駛車輛特點對于定位系統和傳統定位來說,自動駕駛車輛的位置和姿態具有以下特點:◆厘米級的精度需要精確到車輛在車道線內的具體位置,比如距離左右邊緣線幾厘米。◆高頻低延時,要求毫秒級延時,實時傳輸車輛位置,否則會發生安全事故。幾種定位方式的全球導航衛星系統特點:米級精度,低頻干擾或遮擋解決方案:RTK(實時運動學)載波相位差技術,可達厘米級。相對定位:IMU特點:加速度計和陀螺儀在加速度和角速度三個方向的高頻(一般為100HZ)累積誤差。解決方案:慣性導航系統的點云定位是魯棒的,不依賴于GPS信息。根據先前的地圖,地圖的準確性和實時性可能會導致定位誤差。需要解決:弱特征環境。比如在橋上,向前開10米和向后開10米看到的場景都差不多。對于這種環境,如何找到準確的位置是必須考慮的問題。定位系統的多傳感器融合一般來說,僅僅依靠單個傳感器進行定位是不夠的,所以采用多傳感器融合方案。基于卡爾曼濾波模型的整體定位效果將具有更高的精度和更好的魯棒性。卡爾曼濾波器模型卡爾曼濾波器是一種高效的遞歸濾波器,它可以從一系列不完全和有噪聲的測量值中估計出動態系統的狀態。
< img alt = "Di……overy,Man,北京" src = "/ee img/{ HostI }/img/20230304003449321659/17 . jpg "/>
基于卡爾曼濾波模型,我們把自動駕駛車輛當時的位置看成是一個高斯分布,也就是說車輛位于某個區域內,最有可能在中間。隨著車輛行駛,定位系統可以根據運動方程預測車輛的位置。假設一輛車向前行駛了10米,那么這輛車就產生了一個預測位置。然而,在實際駕駛中,預測位置和實際位置之間的誤差逐漸變大。這是因為這個數據可能是IMU給的,IMU作為傳感器自然會有誤差。同時,假設車上裝有GPS,GPS給出的位置信息相當于上圖中的藍色部分,這個定位數據也包含一定的誤差。所以,我們得到了關于這輛車的兩個位置信息,通過組合它們,我們可以得到更準確和可信的結果。可以看到卡爾曼濾波器在不斷的更新迭代,最終達到獲得更精確位置的目的。
定位系統的最終目的是讓萬里無憂,而自動駕駛面臨的挑戰是更低的成本和更苛刻的外部環境。最終解決這些問題,實現這個目標。
根據工信部合格證產量數據,2019年6月新能源乘用車產量為112萬輛,環比上漲1588,同比大漲9417。
1900/1/1 0:00:00伴隨著XmartOS15版本的發布,XPILOT25系統迎來了最重要的一次升級。
1900/1/1 0:00:00(圖片來源:asahicomjp)據外媒報道,在上了年紀的司機決定換一輛配備安全功能的汽車,或者上交駕駛證之前,汽車賽車手TakumaKoga希望年老的司機能夠首先坐上駕駛模擬器模擬一番。
1900/1/1 0:00:00圖片來自“億歐網”如何把握好快與慢,在技術革新、合規守法和維持燃油車主營業務之間達到最佳平衡點,仍將是最大的考驗,對齊普策如此,對寶馬如此,對其他車企亦是如此。
1900/1/1 0:00:00當造車新勢力相繼邁入產品上市、交付階段后,迎接它們的卻是一個嚴峻的市場環境:2018年中國汽車市場在連續增長28年后迎來首次下跌,2019年上半年也未升溫。
1900/1/1 0:00:00圖片來自“億歐網”市場主導,成為后補貼時代首要特征,政策補貼減少將直接推動市場走向優勝劣汰,這考驗了一家企業的技術研發能力及產品表現力。
1900/1/1 0:00:00